
PotatoでのシンプルなGIS
GIS操作のためのPotato環境のセットアップ
Potatoリポジトリをクローンし、simple-gisディレクトリに移動することから始めます。パッケージマネージャーを使用してコア依存関係をインストールし、空間ライブラリ(例:PROJ、GEOS、または同等のもの)が含まれていることを確認します。マップタイル、ベクターデータ、および設定ファイル用のサブディレクトリを持つプロジェクトワークスペースを作成します。
- 根拠:* 標準化された分離環境は、依存関係の競合を防ぎ、チームメンバー間で再現可能な開発を可能にします。この前提は、チームメンバーが互換性のあるオペレーティングシステムとパッケージマネージャーを使用している場合に成り立ちます。
Potatoの空間パッケージをインポートし、データソース接続を確立することでGISモジュールを初期化します。ターゲット地域の要件に合わせて座標参照系(CRS)を設定します。CRSの選択には文書化されたトレードオフが含まれます:グローバルデータセットは通常EPSG:4326(WGS 84、度単位の地理座標)を使用しますが、地域分析では距離と面積の特性を保持するUTMゾーンやローカルデータムなどの投影システムが有益です。
-
具体例:* ヨーロッパのジャガイモ栽培データの場合、EU基準に従って精度を保持するため、EPSG:4258(ETRS89)を権威あるソースCRSとして維持します。Web表示の場合は、レンダリング段階でのみEPSG:3857(Web Mercator)に変換し、Web互換性とのトレードオフとして高緯度での既知の歪みを受け入れます。タイルを
./tilesディレクトリにローカルに保存し、設定可能なキャッシュ制限(例:100MB)を設けることで、後続の読み込み時のネットワークリクエストを削減します。 -
実行可能な示唆:* サンプルGeoJSONファイルを読み込み、基本的なマップをレンダリングしてセットアップをテストします。環境変数、依存関係のバージョン、CRS選択を設定ファイルに文書化することで、チームメイトが数分以内にセットアップを複製できるようにします。この基盤は、後のカスケード的なデバッグ遅延とCRS関連のエラーを防ぎます。
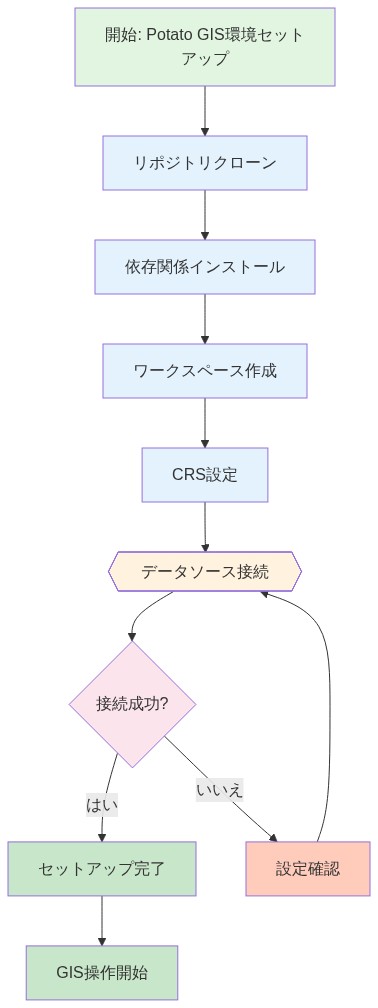
- 図2:Potato GIS環境セットアップのフロー*

- 図1:Potato上でのGIS操作の概念図*
空間データの読み込みと処理
標準フォーマット(GeoJSON、Shapefile、または座標列を持つCSVファイル)から地理データをインポートし、Potatoの組み込みパーサーを使用します。下流処理の前に、不正な形式のエントリ、欠落した属性、トポロジーエラーについて座標を検証します。検証には、座標境界(緯度±90°、経度±180°)、null ジオメトリ、自己交差ポリゴンのチェックを含める必要があります。
- 根拠:* 検証されていない空間データは幾何学的操作でサイレント失敗を引き起こします。早期の検証は何時間ものトラブルシューティングを防ぎ、再現可能な結果を保証します。
ソースデータが作業CRSと異なる場合、確立された変換ライブラリ(例:PROJ)を使用して座標系を変換します。地理的境界または属性値でデータセットをフィルタリングし、処理オーバーヘッドとメモリ消費を削減します。大規模なフィーチャーコレクション(>10,000フィーチャー)の場合、空間インデックス(R-treeまたはquadtree)を構築して準線形クエリパフォーマンスを実現します。インデックスがない場合、空間操作はO(n)の複雑さに劣化します。
-
具体例:* ジャガイモ収量データセットがEPSG:4326で50,000のフィールドポリゴンと混在したデータ品質で到着します。Shapefileを解析し、ジオメトリを検証し(nullまたは無効なジオメトリを持つレコードの約2%を拒否)、作業CRSに再投影し、関心領域にフィルタリングし(12,000ポリゴンに削減)、R-tree空間インデックスを構築します。ストレージフットプリントは45MBから8MBに減少し、その後のポイントインポリゴンクエリは500msではなく10ms未満で実行されます。
-
実行可能な示唆:* 定義されたスケジュール(例:週次)で新しいデータセットを取り込む自動データパイプラインを実装します。重複検出(ジオメトリハッシングまたは属性マッチングを使用)とジオメトリ簡略化(例:設定可能な許容値を持つDouglas-Peuckerアルゴリズム)を組み込み、データセットが成長しても処理速度を維持します。クリーンなデータをGeoJSONまたは最適化されたバイナリフォーマット(例:GeoParquet)で保存し、再現可能な取得を実現します。
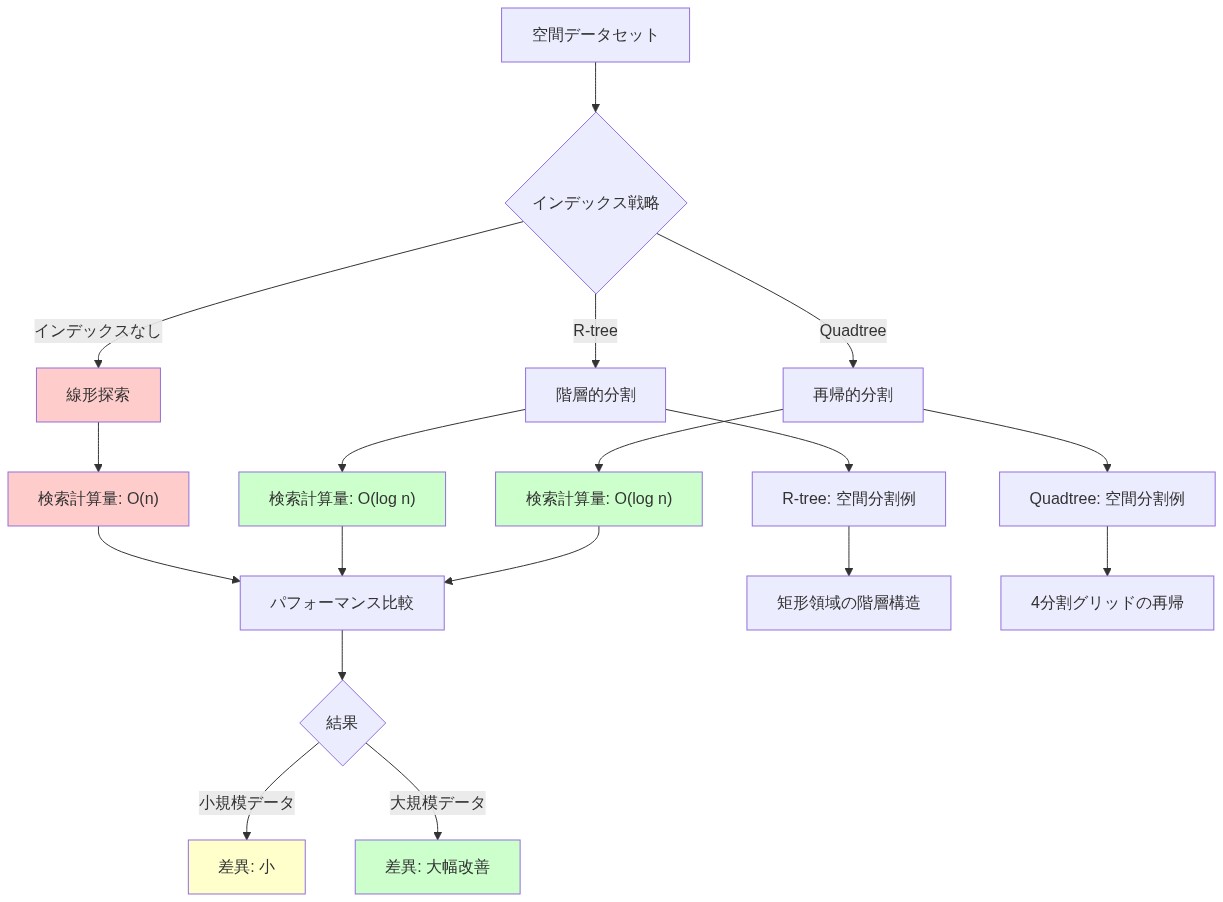
- 図5:空間インデックス(R-tree/Quadtree)によるクエリ性能の改善*
- 図4:空間データ検証パイプラインの概念*
コアマッピング機能の実装
空間データを視覚的なマップに変換するレンダリングパイプラインを開発します。ズームレベル、パン操作、スクリーン空間(ピクセル)と地理空間(CRS単位)間の座標変換を処理してビューポートを管理します。この変換には、現在のズームレベル、ビューポート中心、ピクセル寸法を考慮した明確に定義されたマッピング行列が必要です。
- 根拠:* レスポンシブで正確なレンダリングは、すべてのインタラクティブ機能の基盤を作成します。座標変換のエラーは、すべての下流操作に伝播します。
ラスターベースマップのタイル読み込みを、リクエストキューイングとキャッシングで実装し、冗長なネットワークリクエストを回避します。ズーム対応のスタイリングルール(例:ズーム<10でポリゴン境界を簡略化、ズーム≥14で完全な詳細を表示)を持つポイント、ライン、ポリゴンのジオメトリレンダラーを構築します。視覚的階層を制御するために、可視性トグルとz順序を持つレイヤー管理を追加します。ユーザーがフィーチャーをクリックして選択できるように、ヒット検出(スクリーンからフィーチャーへのマッピング)を実装します。これには逆座標変換と幾何学的包含テストが必要です。
-
具体例:* 3つのレイヤーを持つジャガイモフィールドマップをレンダリングします:ベース衛星画像(WMSまたはタイルサーバーからのラスタータイル)、フィールド境界(50,000フィーチャーを持つポリゴンレイヤー)、灌漑ポイント(2,000フィーチャーを持つポイントレイヤー)。ズームレベル8では、100メートルの許容値を使用してポリゴン境界を簡略化し、頂点数を80%削減します。レベル16では、完全な境界詳細を表示します。フィールドをクリックすると、ポイントインポリゴンテストがトリガーされて選択されたフィーチャーが識別され、異なる色でハイライトされ、属性テーブルからの収量データを含むポップアップが表示されます。
-
実行可能な示唆:* ラスタライゼーション前に画面外のフィーチャーをカリングし、事前計算された詳細度(LOD)バリアントを使用して低いズームレベルでジオメトリを簡略化することで、レンダリングを最適化します。利用可能な場合はハードウェアアクセラレーション(WebGLまたは同等のGPUレンダリング)を使用します。ターゲットハードウェアで現実的なデータ負荷(10,000以上のフィーチャー)下でフレームレートをテストし、ボトルネックを特定します。パンおよびズーム操作中に毎秒60フレームを目指します。

- 図6:マッピング機能のレイヤーアーキテクチャ*
空間クエリ機能の構築
空間分析のためのクエリ関数を構築します:ポイントインポリゴンテスト(座標がポリゴン内にあるかどうかの判定)、バッファ生成(フィーチャーから固定距離のゾーンの作成)、交差検出(重複するジオメトリの識別)、最近傍検索(クエリポイントに最も近いフィーチャーの検索)。地球の曲率を考慮した距離測定には、ハバーサイン公式または測地計算を使用します。平面距離公式は、地球表面で10km以上の距離で1%を超える系統的誤差を導入します。
- 根拠:* 空間クエリは分析力を解放します。ユーザーは「この害虫発生から2km以内にあるフィールドはどれか?」のような質問をし、正確でタイムリーな回答を受け取る必要があります。
地理的関係に基づいて複数のデータセットから属性を結合する空間結合を実装します(例:土壌マップと交差させることで各フィールドに土壌タイプを割り当てる)。ユーザーがマップ上に図形を描いてフィーチャーをインタラクティブにクエリできる選択ツールを追加します。大規模なデータセットでクエリを高速化するために空間インデックスを使用します。インデックスがない場合、50,000ポリゴンに対するポイントインポリゴンクエリには50,000の幾何学的テストが必要です。
-
具体例:* ユーザーがマップ上の汚染地域の周りにポリゴンを描きます。システムは、空間インデックスを使用してそのポリゴンと交差するジャガイモフィールドをクエリし(5秒ではなく50ms未満で結果を返す)、ハバーサイン公式を使用して各フィールドから近くの灌漑源までの距離を計算し、近接性とフィールド属性から計算された汚染リスクスコアを持つ影響を受けるフィールドのランク付けされたリストを返します。
-
実行可能な示唆:* 頻繁なクエリの結果をキャッシュして、冗長な計算を回避します。複数のクエリを効率的に処理するためのバッチ操作を実装します(例:100のクエリポイントから50,000フィーチャーまでの距離を1回のパスで計算)。クエリ実行時間を監視し、クエリが500msを超える場合は空間インデックスを追加します。ボトルネックが幾何学的計算かデータアクセスかを特定するためにプロファイリングします。
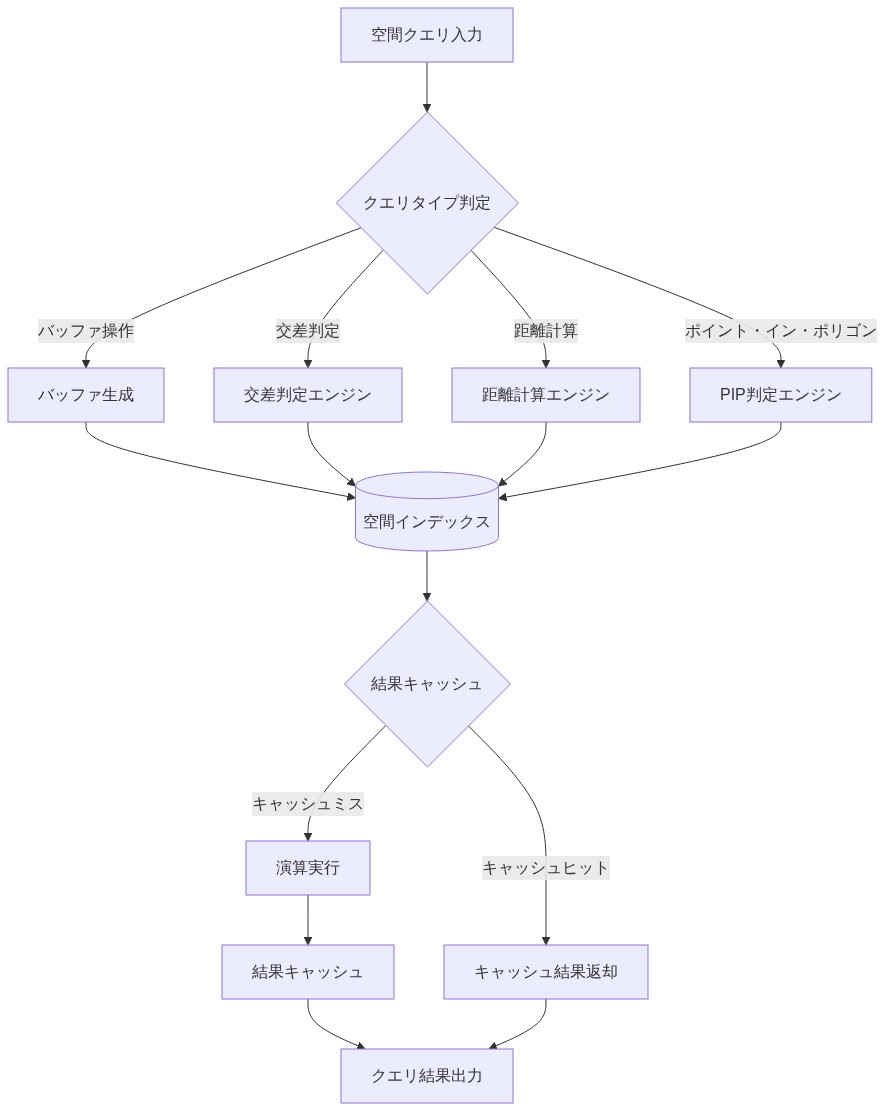
- 図7:空間クエリ機能の実行フロー*
インタラクティブなユーザーコントロールの作成
ズームコントロール(離散レベルまたは連続スケーリング)、パン機能(クリックアンドドラッグまたはキーボード矢印)、レイヤートグル(可視性のチェックボックス)を設計します。アクティブなレイヤーとその属性範囲のシンボロジーを表示する凡例を構築します。距離と面積の測定ツール(測地計算を使用)、住所から座標への変換のためのジオコーディング入力(外部APIまたはローカルガゼッタ経由)、フィーチャー選択モード(クリック、ボックス選択、またはフリーハンドポリゴン)を追加します。
- 根拠:* 直感的で発見可能なコントロールは、非技術ユーザーにGISをアクセス可能にします。不適切なコントロール設計は採用の障壁を作ります。
選択されたフィーチャーの詳細な属性を表示するポップアップパネルを実装し、データタイプに適した書式設定(例:日付、数値、URL)を行います。標準フォーマット(GeoJSON、CSV、Shapefile)でデータまたは分析結果をダウンロードするためのエクスポート機能を作成します。共有と再現性のために、マップ状態(ズーム、中心、アクティブレイヤー、選択)をURLにエンコードするパーマリンク生成を構築します。
-
具体例:* 農家がズームコントロールを使用して自分の地域にズームし、チェックボックスを使用して土壌タイプと降雨量レイヤーをオンにし、フィールドをクリックしてポップアップで収量履歴を確認し、測定ツールを使用して最寄りの水源までの距離を測定し、表示されているデータをCSVとしてエクスポートします。すべてのアクションは2秒未満で完了します。農家は結果のURLを同僚と共有し、同僚は同一のマップ状態を見ます。
-
実行可能な示唆:* モバイルユーザー向けにキーボードショートカットとタッチジェスチャーを優先します。文書なしで発見可能性を確保するために、非GIS専門家でコントロールをテストします。選択やデータを変更するすべてのユーザーアクションに対して、設定可能な深さ(例:50アクション)でアクション履歴を維持し、元に戻す/やり直し機能を追加します。処理前にユーザー入力(例:測定ツールの数値境界)を検証します。
パフォーマンスとデータ管理の最適化
Webワーカーまたはバックグラウンドスレッドを使用して、重い計算(空間結合、バッファ生成、統計分析)をレンダリングスレッドからオフロードし、UIのフリーズを防ぎます。最初に簡略化されたデータを表示し、詳細がバックグラウンドで非同期に読み込まれる間に、プログレッシブローディングを実装します。Douglas-Peucker簡略化などのアルゴリズムを使用して、低いズームレベルで頂点数を削減し、ズームレベルによってジオメトリの複雑さを調整する詳細度(LOD)システムを作成します。
- 根拠:* 大規模なデータセットは最適化なしでは使用不可能になります。パフォーマンスはユーザー維持と分析生産性に直接影響します。
現在のビュー内のフィーチャーのみとバッファゾーン(例:20%マージン)を読み込むビューポートベースのデータフェッチを実装し、メモリフットプリントとネットワーク帯域幅を削減します。標準フォーマット(gzip、brotli)を使用してネットワーク転送用にデータを圧縮します。フレームレート、クエリ時間、メモリ使用量を継続的に監視します。パフォーマンス予算(例:<100MBメモリ、60fpsレンダリング、<500msクエリ時間)を確立し、超過時にアラートを出します。サーバー側フィルタリングやデータストリーミングなど、メモリ制約を超えるデータセットのフォールバック戦略を作成します。
-
具体例:* 500,000のジャガイモフィールドを持つデータセットが、ズームレベル6で簡略化されたポリゴン(元の頂点の10%)を表示することで3秒で読み込まれます。ユーザーがレベル14にズームすると、詳細な境界がバックグラウンドでストリーミングされます。メモリ使用量は全体を通して200MB未満に保たれます。ビューポートベースのローディングにより、どのズームレベルでも約5,000フィーチャーのみがメモリ内にあることが保証されます。
-
実行可能な示唆:* ターゲットハードウェア(例:ミッドレンジラップトップ、モバイルデバイス)で現実的なデータ量でパフォーマンスをベンチマークします。明示的な目標を設定します:100ms未満のクエリ時間、パン/ズーム中の60fpsレンダリング、<300MBメモリ消費。プロファイリングツールを使用してボトルネック(CPU、メモリ、ネットワーク)を特定します。広範なアクセシビリティを確保するために、ローエンドデバイスでテストします。10パーセンタイルデバイスでのパフォーマンスが採用率を決定することがよくあります。

- 図10:空間インデックス手法別のクエリ応答時間比較*
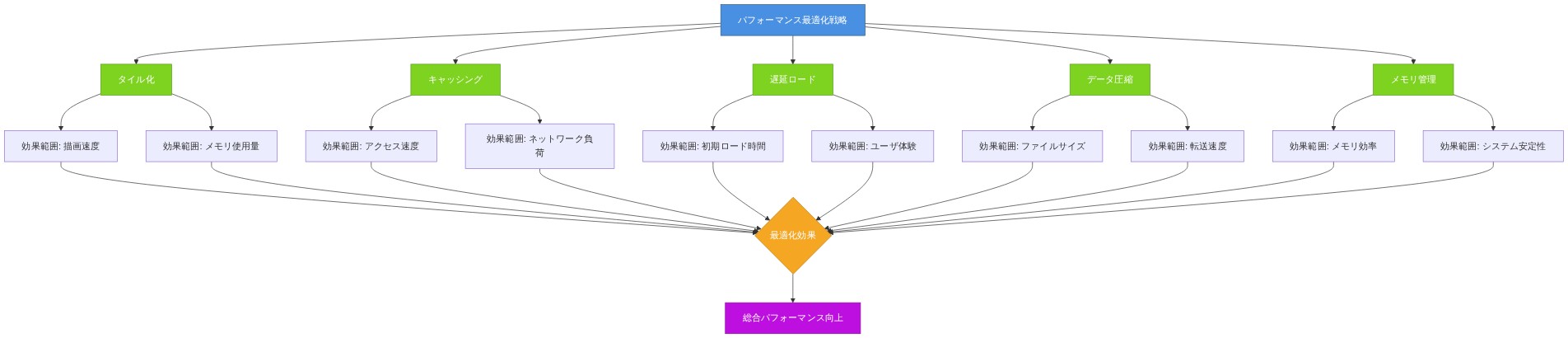
- 図9:GIS性能最適化の戦略マップ*
プラグインと統合による機能拡張
コアコードを変更せずにカスタム機能を有効にするプラグインシステムを作成します。データ読み込み、レンダリング、クエリ操作のための文書化されたフックを持つ明確なプラグインAPIを定義します。外部データソース用のアダプターを構築します:PostGISデータベース、WMS(Web Map Service)サーバー、REST API、リアルタイムデータストリーム。保護されたサービス(APIキー、OAuthトークン、証明書ベースのアクセス)の認証メカニズムを実装します。
- 根拠:* 拡張性により、ユーザーは特定のワークフローに合わせてシステムをカスタマイズできます。プラグインシステムは開発努力を分散することで保守負担を軽減します。
画像(PNG、JPEG)、マップ凡例付きPDF、標準GISフォーマット(GeoJSON、Shapefile、GeoTIFF)のエクスポートモジュールを作成します。ルート最適化、地形分析、または統計モデリングのための分析プラグインを構築します。マップカスタマイズ(配色、シンボロジー、ラベル配置)のためのスタイルエディターを実装します。他のユーザーとマップ、注釈、分析結果を共有するためのコラボレーション機能を追加します。
-
具体例:* 研究者が、フィールドの近接性、気象データ、作物タイプに基づいて害虫拡散確率を計算するプラグインを開発します。プラグインは気象API(毎日の予報を取得)と統合し、スケジュールに従って毎日更新を実行し、他のGISツールにインポートするためのリスクマップをGeoTIFFとしてエクスポートします。プラグインはコアシステムの更新とは独立して動作します。
-
実行可能な示唆:* コード例と参照実装を含むプラグインAPIを明確に文書化します。プラグインが互換性を宣言できるように、コアシステムを明示的にバージョン管理します。可能な場合はマイナーバージョン間で後方互換性を維持します。悪意のあるまたはバグのあるコードがコアシステムに影響を与えるのを防ぐために、サードパーティプラグインをサンドボックス環境でテストしてから展開します。バージョン管理と依存関係追跡を備えた、コミュニティ貢献のためのプラグインリポジトリまたはマーケットプレイスを構築します。

- 図12:プラグイン拡張による高度なGIS機能の可能性*
次のステップ
成功するGISシステムは、クリーンなデータ、レスポンシブなレンダリング、強力なクエリ、直感的なコントロールを組み合わせます。堅固な開発環境を確立することから始め、パフォーマンスを監視しながら段階的に機能を追加します。空間インデックスとキャッシングを早期に優先します。これらはデータが成長するにつれて複利的なリターンをもたらします。
- 即座のアクション:*
- 今週、Potato環境をセットアップし、サンプルデータセットを読み込みます。
- 3つのコアレイヤーを実装します:ベースマップ、フィーチャーレンダリング、ヒット検出。
- 1つの空間クエリ関数(ポイントインポリゴン)を構築し、パフォーマンスを測定します。
- 基本的なズームとパンコントロールを作成します。
- 現実的な負荷下でメモリとフレームレートを監視します。
パフォーマンスのボトルネックを毎月見直します。コントロールがユーザーのメンタルモデルと一致することを検証するために、早期にユーザーを関与させます。初日から拡張性を計画します。最も価値のある機能は、開発者ではなくユーザーから来ることが多いです。
重要なポイントと次のアクション
成功するGISシステムは、検証されたデータ、レスポンシブなレンダリング、強力な空間クエリ、直感的なコントロールを組み合わせます。明確なCRS定義を持つ堅固な開発環境を確立することから始め、明示的な目標に対してパフォーマンスを監視しながら段階的に機能を追加します。空間インデックスとキャッシングを早期に優先します。これらはデータ量が成長するにつれて複利的なリターンをもたらします。
- 即座のアクション:* (1)文書化されたCRS選択を持つPotato環境をセットアップし、今週サンプルデータセットを読み込みます。(2)3つのコアレンダリングレイヤーを実装します:ベースマップタイル、フィーチャージオメトリレンダリング、ユーザーインタラクションのためのヒット検出。(3)1つの空間クエリ関数(ポイントインポリゴン)を構築し、ターゲットデータセットでパフォーマンスを測定します。実行時間とメモリ使用量を文書化します。(4)キーボードショートカット付きの基本的なズームとパンコントロールを作成します。(5)現実的な負荷下でメモリ消費とフレームレートを監視します。パフォーマンスベースラインを確立します。
プロファイリングデータを使用して、パフォーマンスのボトルネックを毎月見直します。コントロールとワークフローがユーザーのメンタルモデルとタスク要件に一致することを検証するために、開発の早い段階でユーザーを関与させます。初日から拡張性を計画します。最も価値のある機能は、開発者の仮定ではなく、ユーザーフィードバックとドメイン固有のプラグインから生まれることが多いです。

- 図13:Simple GIS実装の学習パスとチェックリスト*