
Waymo が南湾の乗客の荷物を持ち去った
自律システムが静かに失敗するとき
南湾の住民が Waymo のロボタクシーを呼び、トランクに荷物を積み込んで出発しました。トランクのラッチが固定されず、機械的な障害が発生しました。自律システムはこの障害を検出することも、乗客や Waymo の運用チームに通知することもできませんでした。車両はサービスに向かい、乗客が数時間後に手動で損失を報告するまで、この事象は検出されませんでした。
この事象は、自動運転車の設計における重大な構造的ギャップを露呈させています。主要なナビゲーションおよび認識タスクの外部にある物理的サブシステムに対する、フェイルセーフな検証メカニズムが存在しないのです。接続性が失われた場合に段階的に性能が低下するネットワーク依存システムとは異なり、自動運転車はサブシステム障害が発生した時点で移動中です。これにより責任が複合化し、信頼の喪失が加速します。障害メカニズムは単一の工学的見落としではなく、むしろ検証されていない仮定の連鎖です。センサーカバレッジが包括的であること、コマンド実行が状態完了を意味すること、そして人間が関与した復旧が車両出発後に発生できることという仮定です。
システム構造とボトルネック
Waymo のセンサースイート(カメラ、ライダー、レーダー)はナビゲーションと衝突回避に最適化されています。トランクラッチは異なる問題領域に属しています。機械的であり、低速で動作し、主要な前向きセンサーアレイの外側に位置しています。ラッチ固定を確認するためのセンサーは割り当てられていません。
運用パターンは単純です。乗客がトランクを閉じ、システムがアクションをログに記録し、車両は成功を前提とします。視覚的確認ステップ、つまり後向きカメラがラッチ状態を検証するステップは、1 回のトリップあたり 2~3 秒のレイテンシと計算オーバーヘッドを追加します。Waymo のアーキテクチャは、二次的な機械的検証よりもスループットとコストを優先します。
- ギャップ:* オペレーターは「トランクが正常に閉じた」と「トランク閉鎖コマンドが実行された」を区別できません。これらは等価な状態ではありません。出発前検証ルーチンは、車両が「移動準備完了」状態に遷移する前に明示的な状態確認を要求することで、このギャップを閉じることができます。
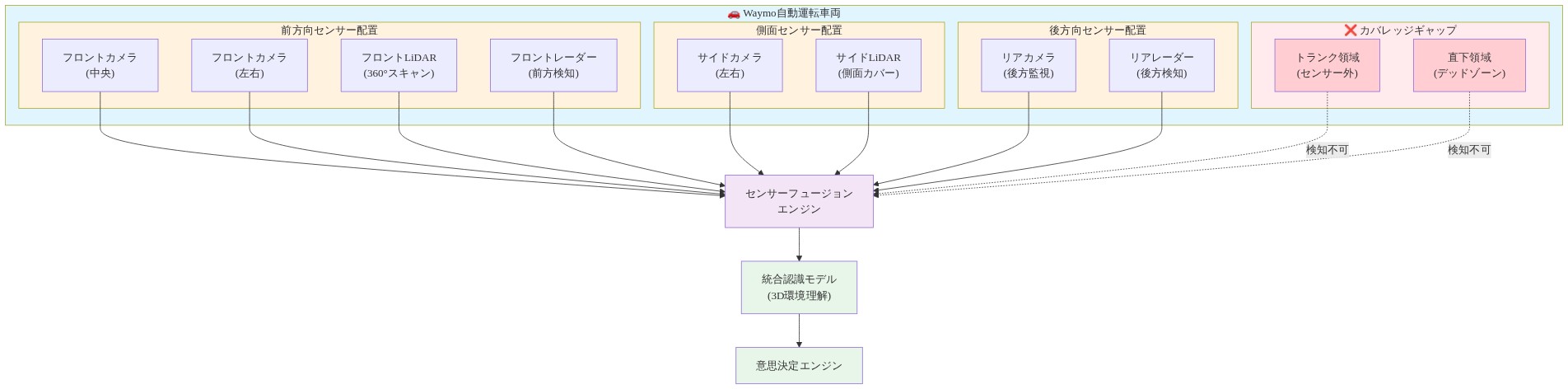
- 図2:Waymoのセンサー配置とトランク領域のカバレッジギャップ*
参照アーキテクチャとガードレール
現在のフェイルセーフは反応的です。乗客が荷物の紛失を報告すると、ログが確認され、事象が分類されます。出発前に荷物のセキュリティを確認する予防的チェックポイントはありません。
人間のタクシー運転手はこのチェックを視覚的に実行します。自動システムは同等のものを実装できます。トランク閉鎖後の短い一時停止、後向きカメラによる検証、確認を受け取るまでの車両移動の保留です。コストは最小限です。1 回のトリップあたり 2~3 秒です。利点は「荷物が置き去りになる」障害クラスの完全な排除です。
- 実装パターン:* 乗客がトランクを閉じた後、車両はキャビン画面に確認プロンプトを表示します。後向きカメラがラッチ固定を検証します。システムは結果をログに記録し、車両の出発をクリアするか、検証が失敗した場合は乗客と運用センターに警告します。
運用とエスカレーション
自動システムは現在、エッジケースの処理を人間のオペレーターに委譲していますが、ハンドオフの計測は不十分です。トランクがラッチに失敗した場合、乗客はリアルタイムで Waymo に問題を通知するための組み込みメカニズムを持ちません。問題が表面化するまでに、車両は既に別の場所でサービス中です。
乗客が開始する検証ワークフローはこれに対処します。「荷物のセキュリティを検証」というラベルの付いたボタンが出発前チェックリストをトリガーし、キャビン画面に確認を表示し、結果をログに記録します。検証が失敗した場合、システムは乗客と Waymo の運用センターの両方に同時に警告し、即座の介入を可能にします。
- 運用メトリック:* アラートから解決までの応答時間です。運用チームを数時間ではなく数分以内に対応するよう訓練してください。解決率をコア運用 KPI として測定してください。
測定とパターン検出
紛失した荷物 1 個は逸話です。トランクラッチの障害 10 件はパターンです。すべての荷物関連イベント(閉鎖試行、検証成功、検証失敗)の構造化ログがなければ、オペレーターはランダム障害と設計欠陥を区別できません。
Waymo は以下をログに記録すべきです。(1) トランク閉鎖コマンド送信、(2) 閉鎖がセンサーで確認、(3) ラッチ固定がカメラで検証、(4) 車両出発承認。ステップ 3 が失敗した場合、システムはステップ 4 をブロックし、乗客に警告します。これらのログを週単位で集約して、どの車両またはラッチがベースライン率を超えて失敗しているかを特定してください。
- 実装タイムライン:* 30 日以内にすべての物理的サブシステムのデータ収集ベースラインを確立してください。エスカレーション閾値を定義してください。例えば、ラッチ障害率が車両あたり 2% を超える場合、メンテナンスがトリガーされます。月次レポートを運用チームとエンジニアリングチームに公開してください。このデータを使用して、再設計または予防保全スケジュールの優先順位を付けてください。
スケーリングとシステミックリスク
単一のトランク障害は 1 人の乗客に影響します。数千の車両が毎日運用される場合、同じ機械的障害は数百の事象に増幅されます。リモートでパッチを適用できるソフトウェアバグとは異なり、物理的障害には車両リコールまたはフィールドメンテナンスが必要です。
Waymo のトランクラッチの 0.5% が年間で失敗し、フリートが 50,000 台に達する場合、これは年間 250 件の荷物損失事象に相当します。各事象はユーザーの信頼を損なわせ、法的責任を生じさせます。軽減にはラッチメカニズムの再設計、冗長検証センサーの追加、または検証が成功するまで出発を防止するソフトウェアレベルの保留が必要です。
- リスク軽減:* すべての機械的サブシステムに対する障害モード分析を実施してください。障害頻度とユーザー影響に基づいて、再設計またはセンサー追加の優先順位を付けてください。システミック障害が特定された場合、48 時間以内に実行可能なリコールプロトコルを確立してください。エンジニアリング再設計と現地運用コストの両方に予算を計上してください。
前進の道
自動運転車は、荷物と乗客のセキュリティをエッジケースではなくシステムレベルの要件として扱う必要があります。Waymo の事象は、最新の自動システムが複雑な交通をナビゲートできるが、単純な機械的検証に失敗することを明らかにしています。この非対称性は設計優先順位を反映しています。ナビゲーションと安全が支配的です。荷物のセキュリティは機能することが前提とされています。
今後 90 日間で、Waymo は (1) すべての物理的サブシステムの検証ギャップを監査し、(2) 高リスク運用の出発前チェックリストを実装し、(3) トランクとドアラッチを検証するための後向きカメラを配置し、(4) 検証失敗のためのリアルタイムエスカレーションワークフローを確立し、(5) システミックパターンを特定するための事象データを公開すべきです。
自動フリートオペレーターにとって、命令は明確です。物理的サブシステム検証をファーストクラスのエンジニアリング問題として扱ってください。ユーザー影響に比例したリソースを割り当ててください。継続的に測定と監視を行ってください。事象データを使用して反復的な改善を推進してください。スケーリングに成功するフリートは、スケール時に発生する前に障害クラス全体を排除するものです。
システムアーキテクチャとセンサーカバレッジの制限
-
基本的主張:* 自動運転車の認識システムはナビゲーションと衝突回避に最適化されており、二次的な機械的サブシステムの検証には最適化されていません。
-
支持根拠:* Waymo のセンサースイート(前向きカメラ、ライダーアレイ、レーダーユニット)は、道路状況、動的障害物、車両キネマティクスを検出するために設計されています。トランクラッチは異なる問題領域を表しています。機械的であり、低速で動作し、主要な前向きセンサーの視野外に位置しています。現在のシステム設計は、リアルタイムトランクラッチ状態確認のためのセンサーリソースを割り当てていません。
-
具体的仕様:* 乗客が手動または自動でトランクを閉じた後、車両の制御システムは閉鎖コマンドをログに記録しますが、ラッチが固定されたことを検証しません。検証ステップ(後向きカメラによるラッチ位置確認など)は、レイテンシ(操作あたり推定 2~3 秒)と計算オーバーヘッドを導入します。Waymo の現在のアーキテクチャは、二次的な機械的検証よりも運用スループットとコスト最小化を優先します。
-
運用上の含意:* フリートオペレーターは、すべての物理的サブシステム(ドア、トランク、アクセスパネル、バッテリー/燃料カバー)の体系的な監査を実施し、どのサブシステムがリアルタイム状態検証を備えているか、どのサブシステムがコマンド実行の仮定に依存しているかを文書化する必要があります。検証を欠くサブシステムごとに、オペレーターは責任露出を定量化し、検証センサーまたは機械的冗長性を追加することの費用対効果を検討すべきです。
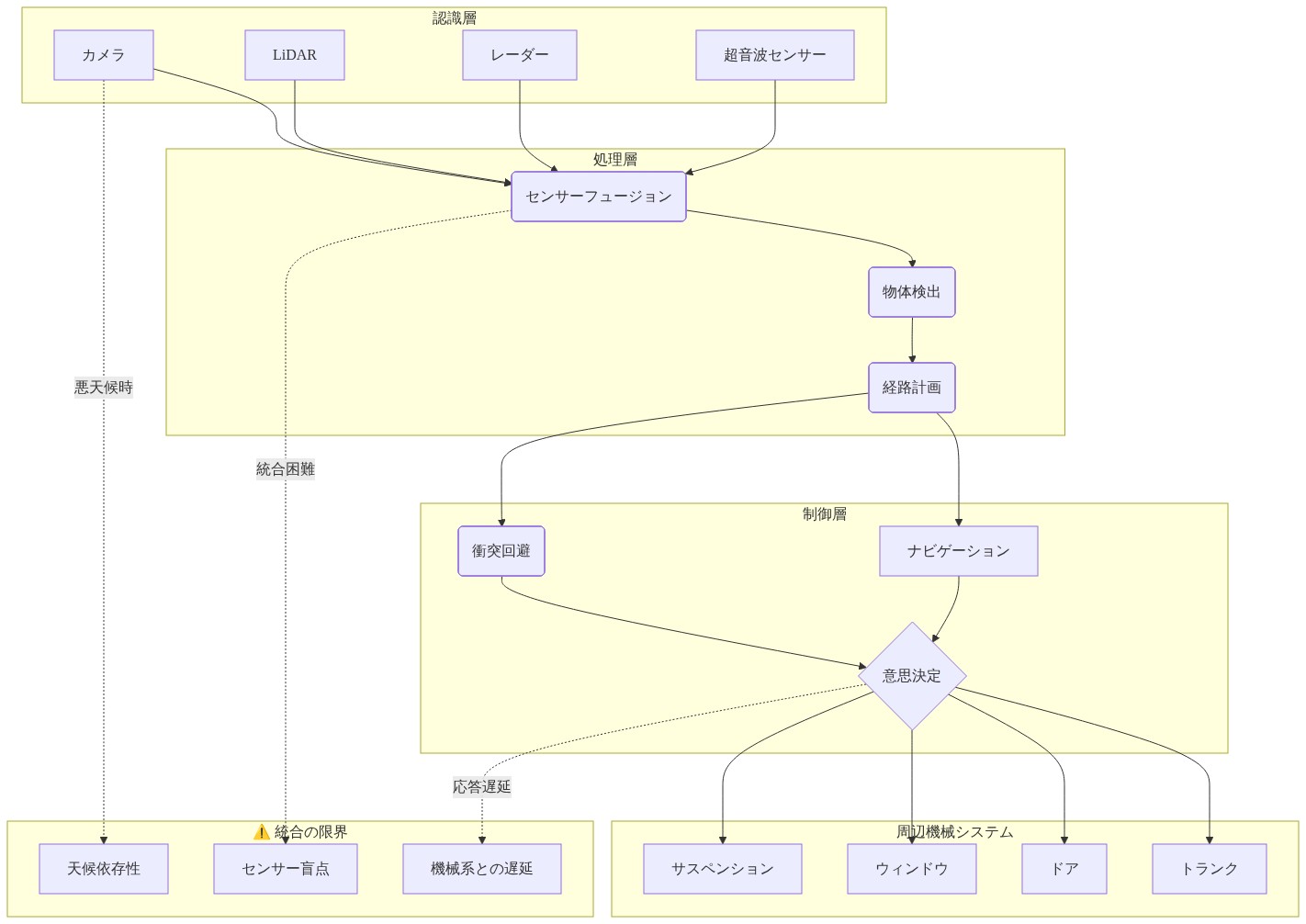
- 図3:自動運転システムの主要機能と周辺機械システムの分離、および現在のセンサー統合の限界*
反応的対予防的フェイルセーフアーキテクチャ
-
基本的主張:* 現在の自動運転車のフェイルセーフは反応的です。障害が検出された後にトリガーされます。障害が発生する前にそれをブロックするように設計された予防的ではなく。
-
支持根拠:* Waymo の事象対応は、おそらく事後的なパターンに従います。乗客が荷物の紛失を報告し、車両ログが取得および分析され、事象が分類および記録されます。この反応的モデルは荷物損失を防ぐことはできません。事実の後に文書化および改善することしかできません。予防的アーキテクチャには、車両が「移動準備完了」状態に遷移する前に物理的サブシステム状態を確認する出発前検証チェックポイントが含まれます。
-
具体的仕様:* 人間のタクシーオペレーターは、乗客と一緒に出発する前にトランクの視覚検査を実行します。同等の自動システムは、以下のシーケンスを実装できます。(1) 乗客がトランクを閉じる、(2) システムが 2~3 秒間一時停止する、(3) 後向きカメラがラッチ位置をキャプチャする、(4) コンピュータビジョンアルゴリズムがラッチ固定を確認する、(5) 確認が成功した場合、車両は「移動準備完了」に遷移します。確認が失敗した場合、車両は乗客と運用センターに警告し、問題が解決されるまで出発がブロックされます。
-
運用上の含意:* 自動フリートオペレーターは、すべてのユーザー向け物理操作に対する出発前検証ルーチンを設計すべきです。各ルーチンは、車両がアクティブサービスに遷移する前に明示的な状態確認を要求する必要があります。オペレーターは、レイテンシコスト(通常、1 回のトリップあたり 2~5 秒)を文書化し、責任削減とユーザー信頼の利点と比較すべきです。高頻度または高価値の操作では、トレードオフは通常、検証を支持します。
乗客が開始する検証とリアルタイムエスカレーション
-
基本的主張:* 自動システムは現在、物理的サブシステム状態を検証したり、異常をリアルタイムでエスカレートしたりするための乗客がアクセス可能なメカニズムを欠いています。
-
支持根拠:* トランクがラッチに失敗した場合、乗客は車両が出発する前に Waymo に問題を通知するための組み込みメソッドを持ちません。問題が表面化するまで(乗客が荷物の紛失を発見してから数時間後)、車両は既に別の場所でサービス中です。即座の介入のための時間枠は閉じられています。
-
具体的仕様:* 車両のキャビンインターフェースには、乗客が開始する検証ワークフローが含まれる可能性があります。「荷物のセキュリティを検証」というラベルの付いたボタンが出発前チェックリストをトリガーします。システムはキャビン画面に確認ステータスを表示し、結果を車両のイベントレコードにログに記録します。検証が失敗した場合、車両は乗客と Waymo の運用センターの両方に同時に警告し、即座の人間による介入を可能にします。
-
運用上の含意:* 自動フリートオペレーターは、高リスク運用(荷物輸送、複数乗客トリップ、長距離ルート)に対する乗客が開始する検証ワークフローを実装すべきです。これらのワークフローは自動エスカレーションプロトコルと組み合わせるべきです。システムが異常を検出した場合、人間のオペレーターは 60 秒以内に通知され、車両位置、センサーデータ、乗客の連絡先情報が提供されます。運用チームは 5~10 分以内に問題に対応および解決するよう訓練すべきです。応答時間と解決率は、コア運用メトリックとして追跡すべきです。
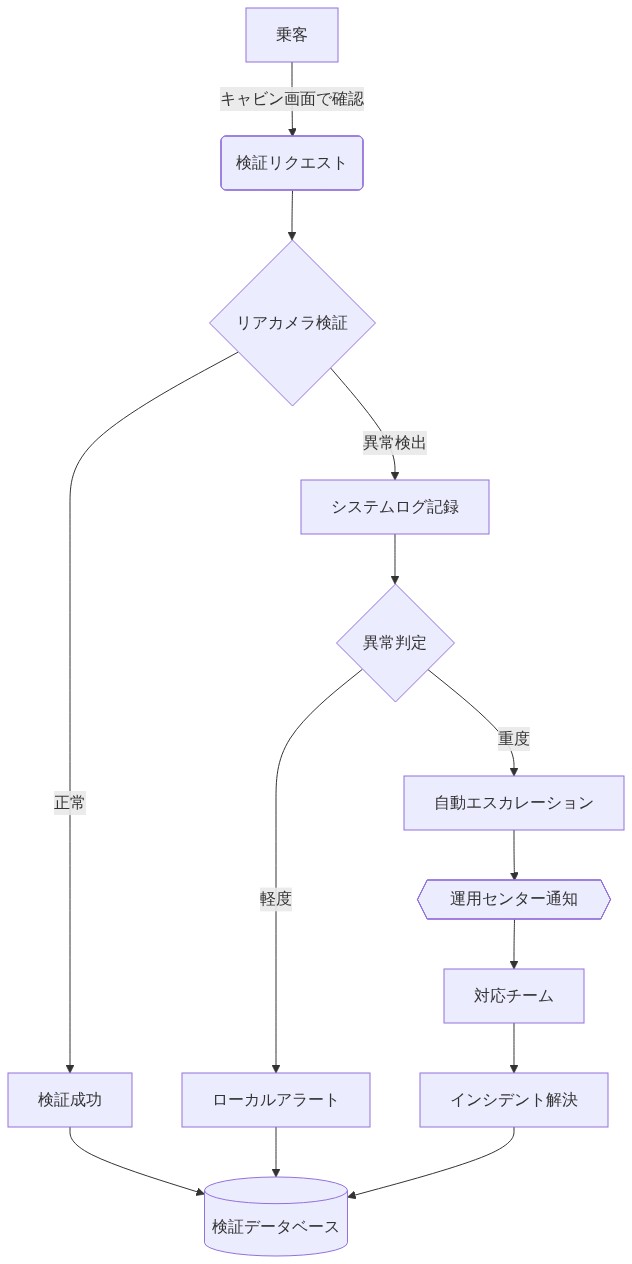
- 図5:乗客主導の検証と実時間エスカレーションフロー*
構造化事象ログとパターン検出
-
基本的主張:* 事象データは、システミック障害をランダムイベントから区別するために、粒度が細かく、体系的に集約される必要があります。
-
支持根拠:* 紛失した荷物 1 個は孤立した事象です。90 日間で 1,000 台の車両フリート全体で 10 件のトランクラッチ障害は、システミック設計欠陥または特定の生産バッチに影響する製造欠陥を示す可能性があります。すべての荷物関連イベント(閉鎖試行、検証成功、検証失敗、出発承認)の構造化ログがなければ、オペレーターはランダム障害を実行可能なパターンから区別できません。
-
具体的仕様:* Waymo は、すべての荷物操作に対する粒度の細かいイベントログを実装すべきです。(1) トランク閉鎖コマンド発行、(2) 閉鎖センサーが物理的移動を確認、(3) ラッチ固定が後向きカメラで検証、(4) 車両出発承認。各イベントはタイムスタンプを付けられ、特定の車両、トリップ ID、乗客にリンクされるべきです。ステップ 3 が失敗した場合、システムはステップ 4 をブロックし、障害理由をログに記録すべきです。これらのログの週単位の集約は、どの車両またはラッチメカニズムがフリートベースラインを超える率で失敗しているかを特定すべきです。
-
運用上の含意:* 自動フリートオペレーターは、展開から 30 日以内にすべての物理的サブシステムのデータ収集ベースラインを確立すべきです。エスカレーション閾値を定義してください。例えば、月あたり車両あたりのラッチ障害率が 2% を超える場合、即座のメンテナンススケジューリングがトリガーされます。週単位または月単位のレポートをエンジニアリングおよび運用チームに公開してください。集約されたデータを使用して、再設計、予防保全スケジュール、またはコンポーネントリコールの優先順位を付けてください。
障害モード分析と軽減優先順位付け
-
基本的主張:* 設計意図と運用現実の間のギャップは、自動フリートがスケーリングするにつれて拡大します。単一車両の障害は複数の車両パターンに増幅されます。
-
支持根拠:* 1 人の乗客に影響するトランクラッチ障害は 1 件の事象を生じさせます。フリートが毎日 50,000 台の車両を運用する場合、同じ機械的障害(車両の割合に存在する場合)は年間数百の事象に増幅されます。すべての車両に同時にリモートでパッチを適用できるソフトウェアバグとは異なり、物理的障害には車両リコール、フィールドメンテナンス、またはコンポーネント交換が必要です。これらはそれぞれ運用上高額で時間がかかります。
-
具体的仕様:* 製造欠陥または設計上の弱さが原因で Waymo のトランクラッチの 0.5% が年間で失敗し、フリートが 50,000 台に成長する場合、フリートは年間約 250 件の荷物損失事象を経験します。各事象はユーザーの信頼を損なわせ、カスタマーサービスコストを生じさせ、潜在的な法的責任を生じさせます。軽減戦略には、(a) ラッチメカニズムを再設計して障害モードを排除する、(b) 冗長検証センサーを追加する(例えば、デュアルカメラ、機械的位置センサー)、または (c) 検証が成功するまで車両移動を防止するソフトウェアレベルの出発保留を実装することが含まれます。
-
運用上の含意:* 自動フリートオペレーターは、すべての機械的サブシステムに対する障害モード影響分析(FMEA)を実施すべきです。各サブシステムについて、障害頻度、ユーザー影響の重大度、検出困難性を推定してください。これらの要因の積に基づいて、再設計またはセンサー追加の優先順位を付けてください。フリートの 1% を超える車両に影響するシステミック障害が特定された場合、48 時間以内に実行可能なリコールプロトコルを確立してください。エンジニアリング再設計コストと現地運用コスト(技術者時間、部品、ロジスティクス)を別途に予算計上してください。
システムレベルの要件とエンジニアリング優先順位付け
-
基本的主張:* 自動運転車は、貨物とパッセンジャーのセキュリティをシステムレベルの要件として扱う必要があります。エッジケースや二次的な懸念事項ではなく、です。
-
支持根拠:* Waymoのインシデントは、自動運転システム設計における非対称性を明らかにしています。車両は複雑な交通シナリオをうまくナビゲートしますが、単純な機械的検証に失敗しています。この非対称性はエンジニアリング優先順位付けを反映しています。ナビゲーション安全性が設計リソースと検証テストを支配し、貨物セキュリティは明示的な検証なしに機能することが前提とされています。自動運転フリートが成熟し、ユーザー期待が高まるにつれて、この前提は規模において繰り返し失敗します。
-
具体的仕様:* 90日間の実装期間にわたり、フリート運用者は以下を実行すべきです。(1) すべての物理サブシステムを検証ギャップについて監査し、リアルタイム状態確認が欠けているサブシステムを文書化する、(2) 貨物輸送やパッセンジャー安全機能などの高リスク操作に対する出発前チェックリストを実装する、(3) トランクとドアラッチの係合を検証するためにリア向きカメラまたは機械センサーを配置する、(4) 検証失敗の60秒以内に運用センターに通知するリアルタイム段階的エスカレーションワークフローを確立する、(5) システムパターンを特定し、将来の再設計の優先順位付けを通知するために週次集計インシデントデータを公開する。
-
運用上の含意:* 自動運転フリート運用者にとって、運用成熟度への道は、物理サブシステム検証を一流のエンジニアリング問題として扱うことを必要とします。ユーザー影響と失敗頻度に比例したエンジニアリングリソースを配分してください。問題が規模で発生する前に測定とモニタリングシステムを確立してください。インシデントデータを使用して反復的改善を推進してください。正常にスケールする自動運転フリートは、反応的インシデント対応に依存するのではなく、予防的設計と検証を通じて失敗のクラス全体を排除するものになります。
実装と運用パターン
-
ハンドオフ問題:* 自動運転システムはエッジケース処理を人間のオペレーターに委譲しますが、ハンドオフは十分に計測されていません。トランクがラッチに失敗した場合、車両には組み込みの回復メカニズムがありません。パッセンジャーはWaymoにリアルタイムで問題を簡単に通知できません。問題が表面化するまでに、車両は既に他の場所でサービス中であり、保管チェーンが破断しています。
-
パッセンジャー主導の検証ワークフロー:*
-
車内インターフェース: パッセンジャーは、アイテムを積み込んだ後、キャビンタッチスクリーンに「貨物セキュリティを検証」というラベルの付いたボタンを見ます。
-
自動チェックリスト: システムはチェックリストを表示します。
- トランクは閉じていますか。(パッセンジャーが確認)
- ドアはロックされていますか。(システムが検証)
- 貨物はトランクカメラに見えていますか。(システムがリア画像を表示)
- 出発する準備はできていますか。(パッセンジャーが確認)
-
リアルタイムログ: 各ステップはタイムスタンプされ、ログされます。いずれかのステップが失敗した場合、システムは失敗理由と重大度レベルをキャプチャします。
-
エスカレーショントリガー: 検証が失敗した場合、システムは直ちに以下を実行します。
- パッセンジャーにエラーメッセージを表示
- 車両ID、位置、失敗タイプを含むアラートをWaymo運用センターに送信
- 車両を「スタンバイ」モードに保持(エンジン/モーターは準備完了だが移動しない)
- パッセンジャーに運用センターに連絡する電話番号を提供
-
運用対応: 人間のオペレーターが2分以内にパッセンジャーに電話し、問題を診断し、(a) パッセンジャーを再検証ガイダンスを通じて案内するか、(b) メンテナンスを派遣するか、(c) 代替輸送を提供します。
- 追跡する運用メトリクス:*
- 検証成功率(目標:>99.5%)
- 失敗検出から運用センター連絡までの時間(目標:<2分)
- 解決時間(目標:ほとんどのケースで<15分)
- 検証プロセスに対するパッセンジャー満足度(目標:>4.0/5.0)
測定と次のアクション
-
データ収集ギャップ:* インシデントデータは、逸話ではなく、システムパターンを明らかにするのに十分な粒度である必要があります。1つの紛失した荷物は外れ値です。100台の車両にわたるトランクラッチに関連する10件のインシデントはパターンです。すべての貨物関連イベントの構造化ログなしに、運用者はランダム失敗と設計欠陥を区別できません。
-
ログフレームワーク:* すべての物理サブシステム操作に対するイベントレベルのログを実装します。
| イベント | タイムスタンプ | 車両ID | サブシステム | ステータス | センサーデータ | ユーザーアクション |
|---|---|---|---|---|---|---|
| トランク閉鎖コマンド | 14:32:15 | WM-5847 | トランクラッチ | 開始 | N/A | パッセンジャーが閉鎖を押下 |
| 閉鎖センサー作動 | 14:32:17 | WM-5847 | トランクラッチ | 確認 | 機械スイッチ:ON | N/A |
| カメラ検証 | 14:32:19 | WM-5847 | トランクラッチ | 失敗 | 画像分析:ラッチ開放 | N/A |
| パッセンジャーアラート | 14:32:20 | WM-5847 | トランクラッチ | エスカレート | N/A | システムがパッセンジャーに通知 |
| 運用センター連絡 | 14:32:45 | WM-5847 | トランクラッチ | 進行中 | N/A | 人間のオペレーターが電話 |
- 集計と分析(週次):*
-
サブシステム別失敗率: 検証に失敗した操作の割合を計算します。失敗率が0.5%を超えるサブシステムにフラグを立てます。
-
車両別失敗率: 平均以上の失敗率を持つ車両を特定します。これらはメンテナンスまたは交換の候補です。
-
位置別失敗率: 失敗がクラスタリングする地理的領域を特定します(例:高湿度がラッチ腐食を引き起こす)。それに応じてメンテナンススケジュールを調整します。
-
解決までの時間: 運用チームが検証失敗にどの程度迅速に対応し、解決するかを測定します。ボトルネックを特定します。
-
エスカレーション閾値:*
-
単一車両が2%失敗率を超える → 48時間以内にメンテナンスをスケジュール
-
フリート全体のサブシステムが0.5%失敗率を超える → 根本原因分析のためにエンジニアリングにエスカレート
-
いずれかのサブシステムが1%失敗率を超える → リコール評価を開始
-
報告頻度:*
-
日次:現在の失敗率とオープンインシデントを示すリアルタイムダッシュボード
-
週次:トレンド分析を含む運用チームへの集計レポート
-
月次:設計変更またはプロセス改善の推奨事項を含むエグゼクティブサマリー
リスクと軽減戦略
-
スケーリングリスク:* 自動運転フリートがスケールするにつれて、設計意図と運用現実の間のギャップが広がります。単一のトランク失敗は1人のパッセンジャーに影響します。数千台の車両が毎日運用される場合、同じ機械的欠陥は数百のインシデントに増幅されます。ソフトウェアバグはリモートでパッチできますが、物理的失敗は車両リコールまたはフィールドメンテナンスを必要とします。どちらも費用がかかり、運用上の混乱をもたらします。
-
失敗伝播モデル:*
-
現在のフリートサイズ:約1,000台
-
想定されるトランクラッチ失敗率:年間0.5%
-
現在のインシデント/年:5件
-
予想フリートサイズ(3年後):50,000台
-
予想インシデント/年:250件
-
予想サポートコスト:250件 × インシデント当たり$1,500 = 年間$375,000
-
予想評判コスト:定量化は困難ですが、ユーザーチャーンと規制精査で測定可能
-
軽減戦略1:予防的再設計*
-
アクション: 機械エンジニアリングチームに、冗長な係合ポイントを備えたトランクラッチメカニズムの再設計を依頼
-
タイムライン: 設計、テスト、検証に8~12週間
-
コスト: エンジニアリングと工具で$200,000~500,000
-
利点: 失敗率を0.5%から<0.1%に削減
-
ROI: 約150~300件のインシデント防止後に損益分岐点に達する(予想規模で1~2年)
-
軽減戦略2:センサー冗長性*
-
アクション: ラッチ係合を確認するための二次検証センサー(機械スイッチ+カメラ)を追加
-
タイムライン: ハードウェア統合とソフトウェア開発に4~6週間
-
コスト: 車両当たり$100~200 × 50,000台 = フリート全体で$5~1,000万
-
利点: 車両が出発する前に失敗を検出。リアルタイムアラートを有効化
-
ROI: 「貨物が置き去りにされた」インシデントの100%を防止。コストは車両ライフタイム全体で償却
-
軽減戦略3:運用上の回避策*
-
アクション: ハードウェア変更なしでパッセンジャー主導の検証ワークフロー(上記参照)を実装
-
タイムライン: ソフトウェア開発とテストに2~4週間
-
コスト: 開発で$50,000~100,000。車両当たりのハードウェアコストなし
-
利点: ほとんどの失敗をキャッチ。パッセンジャーエンゲージメントに依存
-
リスク: パッセンジャーが検証ステップをスキップする可能性。すべての失敗をキャッチしない
-
推奨アプローチ:* 戦略3を直ちに(2~4週間)短期的な修正として実装します。同時に戦略1(8~12週間)を長期的なソリューションとして追求します。戦略1が実行不可能であることが判明した場合、戦略2はフォールバックです。
-
リコールプロトコル:* システム的失敗が特定された場合(例:特定のラッチモデルで>2%失敗率)、48時間以内に以下を実行します。
- 直ちのアクション: すべての影響を受ける車両にソフトウェアアップデートを発行し、そのラッチモデルを無効化し、出発前に手動検証を要求
- 通信: 過去30日間に影響を受ける車両を使用したすべてのパッセンジャーに通知
- ロジスティクス: すべての影響を受ける車両に対して7日以内にメンテナンス予約をスケジュール
- 改善: ラッチハードウェアを交換またはハードウェア修正を配置
- 検証: サービスに戻す前にすべての影響を受ける車両をテスト
- 文書化: 14日以内にインシデントレポートと改善サマリーを公開
結論と移行計画
-
戦略的命令:* 自動運転車は、貨物とパッセンジャーのセキュリティをシステムレベルの要件として扱う必要があります。エッジケースではなく、です。Waymoのインシデントは、最新の自動運転システムが複雑な交通をナビゲートできるが、単純な機械的検証に失敗することを明らかにしています。この非対称性は優先順位付けを反映しています。ナビゲーションと安全性が設計を支配し、貨物セキュリティは前提とされています。フリートが成熟し、ユーザー期待が高まるにつれて、この前提は繰り返し破断します。
-
90日間の実装ロードマップ:*
-
1~14日目:評価*
-
すべての物理サブシステムを検証ギャップについて監査
-
リアルタイム状態確認が欠けているサブシステムを特定
-
ユーザー影響と失敗可能性によってサブシステムを優先順位付け
-
成果物:リスクスコア付きサブシステム監査マトリックス
-
15~30日目:設計*
-
高リスクサブシステムの出発前検証ワークフローを設計
-
センサー要件と検出アルゴリズムを指定
-
エスカレーション手順と運用対応プロトコルを定義
-
成果物:詳細な設計ドキュメントとワークフロー図
-
31~60日目:実装*
-
パイロットフリート(500台)にパッセンジャー主導検証インターフェースを配置
-
リア向きカメラフィードと画像処理を統合
-
リアルタイムログとエスカレーションシステムを実装
-
新しい検証ワークフローについて運用チームをトレーニング
-
成果物:99%以上のアップタイムを備えたパイロット配置
-
61~90日目:検証とロールアウト*
-
パイロットフリートからデータを収集。検証成功率とパッセンジャー摩擦を測定
-
パイロットフィードバックに基づいてワークフローを改善
-
フリート全体に段階的にロールアウト(週当たり10,000台)
-
週次インシデントレポートとトレンド分析を公開
-
成果物:文書化されたベースラインメトリクスを備えたフリート全体の配置
-
成功基準:*
-
検証成功率:>99.5%
-
運用対応時間:失敗の95%で<2分
-
パッセンジャー満足度:検証プロセスで>4.0/5.0
-
貨物損失インシデント:トリップの<0.1%
-
インシデント当たりのサポートコスト:<$1,000
-
長期ビジョン(6~12ヶ月):*
-
トランクラッチメカニズムの完全な機械的再設計を完了
-
フリート全体にセンサー冗長性を配置
-
すべての物理サブシステムで<0.01%失敗率を達成
-
自動運転フリートを貨物セキュリティの業界標準として確立
自動運転フリート運用者にとって、前進の道は明確です。物理サブシステム検証を一流の問題として扱ってください。ユーザー影響に比例したエンジニアリングリソースを配分してください。継続的に測定とモニタリングを実施してください。インシデントデータを使用して反復的改善を推進してください。正常にスケールする車両は、規模で発生する前に失敗のクラス全体を排除するものになります。
問題の再構成:エッジケースから設計フロンティアへ
-
テーゼ:* 自動運転車は、アーキテクチャが機械的検証をオプションではなく基礎として扱わないため、静かに失敗します。
-
これが重要な理由:* ネットワーク廃止によって機能を失うコネクテッドデバイスとは異なり、自動運転車は移動中に失敗し、カスケード責任と信頼侵食を作成します。しかし、より重要なことに、この失敗モードは設計ブラインドスポットを明らかにしています。物理サブシステムの閉ループ検証の欠如です。Waymoのセンサースイート(カメラ、ライダー、レーダー)は、道路状況、歩行者、車両ダイナミクスを並外れた精度で追跡します。しかし、トランクラッチ、ドアハンドル、貨物セキュリティは、まったく異なる問題空間を占めています。それらは機械的で、低速度で、主要な前向きセンサーアレイの外側に位置しています。
-
イノベーション機会:* これはパッチされるべきバグではなく、設計フロンティアです。包括的な物理サブシステム検証をコアアーキテクチャに組み込む自動運転車運用者は、信頼性の新しい標準を確立します。パッセンジャーはそのサービスを選択します。より安いからではなく、信頼できるからです。保険会社はより低いプレミアムを提供します。規制当局はそれをモデルとして引用します。これはカテゴリー定義企業がどのように構築されるかです。
-
具体的シナリオ:* すべてのユーザー向け物理操作(トランク閉鎖、ドアラッチング、パッセンジャー乗降)がリアルタイムで検証されるWaymo車両を想像してください。車両が「移動準備完了」ステータスに移行する前に。リア向きカメラがトランク係合を確認します。ドアフレームの圧力センサーが閉鎖を検証します。重量分布センサーがパッセンジャー着座を確認します。システムはすべての確認をログし、ミリ秒以内に異常にフラグを立てます。パッセンジャーは二度と荷物を失いません。規制検査官は、安全基準を数桁上回る車両を見ます。これは段階的改善ではなく、カテゴリー再定義です。
システムアーキテクチャ:検証ギャップを戦略的機会として
-
主張:* 現在の自動運転車アーキテクチャは、サブシステム検証を犠牲にしてスループットを最適化しています。
-
証拠:* Waymoの設計はナビゲーションと安全性を優先します。自動運転を可能にするコア能力です。トランクラッチは、従来の車両から継承された解決済みの問題として扱われています。ラッチ係合を確認するセンサーはありません。パッセンジャーがトランクを閉じた後、システムはアクションをログしますが、完了を検証しません。視覚的確認ステップ(ラッチ状態をチェックするリア向きカメラ)は、レイテンシーと計算オーバーヘッドを追加します。Waymoのアーキテクチャはコストと速度を最適化し、二次的な機械的検証ではなく、です。
-
戦略的リフレーム:* これは弱点ではなく、出発点です。次世代の自動運転車アーキテクチャは、物理サブシステム検証を一流の設計要件として扱います。衝突回避またはトラフィック信号認識と同等です。このシフトには以下が必要です。
-
センサー冗長性: 重要なサブシステムの複数の検証方法(カメラ、圧力センサー、機械スイッチ)により、単一障害点がないことを確保。
-
リアルタイム検証ループ: 車両が移動する前にすべての物理サブシステムが正しい状態にあることを確認する出発前チェックリスト。
-
段階的対応プロトコル: 軽微な異常はパッセンジャーへのアラートをトリガー。重大な失敗は車両操作を停止し、人間のオペレーターにエスカレート。
-
予測メンテナンス統合: 機械サブシステムの継続的モニタリングにより、失敗が発生する前に予測し、規模での予防メンテナンスを有効化。
-
競争優位性:* このアーキテクチャを最初に実装する自動運転フリート運用者は、貨物損失インシデントをほぼゼロに削減し、ユーザー満足度と保持を劇的に改善します。保険コストは低下します。規制承認は加速します。これはアーキテクチャ卓越性を通じて市場リーダーシップを確立するための3~5年のウィンドウです。
運用実装:リアクティブから予防的へ
-
主張:* 現在のフェイルセーフはリアクティブです。未来は予防的システムに属しています。
-
今日の現実:* Waymoのシステムには、問題が検出された後のアラートが含まれています。乗客が荷物の紛失を報告し、ログが確認され、インシデントが分類されます。復旧は手動で遅いです。問題が表面化する時点で、車両は既に別の場所で運用中であり、乗客の信頼は既に損なわれています。
-
明日の機会:* 自動運転車は、発生前に問題全体のクラスを排除する予防的検証ルーチンを実装できます。運用フローを考えてみてください。
- 乗客が荷物を積み込みます。 後ろ向きカメラが積み込みシーケンスをキャプチャします。
- 乗客がトランクを閉じます。 メカニカルスイッチとカメラが閉鎖を確認します。
- システムがラッチの係合を検証します。 検証が成功した場合、車両はキャビン画面に確認を表示し、結果をログに記録します。検証が失敗した場合、車両は乗客に直ちにアラートを出します。「トランクラッチが安全でない可能性があります。もう一度閉じるか、サポートに連絡してください。」
- 乗客が準備完了を確認します。 オプション:乗客が「荷物のセキュリティを検証」ボタンを押して、追加の確認を得ます。
- 車両が準備完了状態に移行します。 すべての検証が成功した後にのみ、車両は出発を承認します。
これは1回の移動あたり2~3秒を追加しますが、荷物の紛失インシデントを完全に排除します。規模で考えると、これは大きな競争上の利点です。
-
実装ロードマップ:*
-
1~2ヶ月目: すべての物理的サブシステム(ドア、トランク、燃料・バッテリーアクセス、乗客用シートベルト)を監査し、リアルタイム検証が不足しているものを文書化します。ユーザーの苦情とインシデント頻度に基づいて、最も影響の大きいサブシステムを特定します。
-
3~4ヶ月目: 優先度の高いサブシステムの検証ワークフローを設計します。センサー要件、レイテンシ予算、エスカレーションプロトコルを指定します。
-
5~6ヶ月目: パイロットフリート(500~1,000台の車両)に検証システムを展開します。インシデント削減、ユーザー満足度、運用オーバーヘッドを測定します。
-
7~12ヶ月目: 全フリートにスケールします。パイロットデータに基づいてワークフローを改善します。予測保守システムと統合します。
データアーキテクチャ:インシデントを洞察に変える
-
主張:* インシデントデータは、システム的なパターンを明らかにし、予測的介入を可能にするのに十分な粒度を持つ必要があります。
-
現在の状態:* 1つの荷物の紛失は逸話です。トランクラッチに関連する10件のインシデントはパターンです。すべての荷物関連イベント(閉鎖の試み、検証の成功、検証の失敗)の構造化ログがなければ、オペレーターはランダムな障害と設計欠陥を区別できません。
-
将来の状態:* 自動運転フリートオペレーターは、すべての物理的サブシステムに対する包括的なテレメトリを実装する必要があります。
-
イベントログ: すべてのトランク閉鎖コマンド、すべての検証試行、すべての成功または失敗は、タイムスタンプ、車両ID、センサー読み取り値とともにログに記録されます。
-
集約と分析: 週次レポートは、どの車両またはサブシステムがベースライン以上のレートで失敗しているかを特定します。月次トレンド分析は、障害率が改善しているか悪化しているかを明らかにします。
-
予測モデリング: 履歴データで訓練された機械学習モデルは、次の7~30日間に障害を経験する可能性が高い車両を予測し、インシデント発生前の予防保守を可能にします。
-
規制上の透明性: 物理的サブシステムの信頼性に関する月次公開レポートは、ユーザーの信頼を構築し、安全性への取り組みを実証します。
-
具体的なメトリクス:*
-
トランクラッチ障害率(目標:年間1台あたり0.1%未満)
-
ドアラッチ障害率(目標:年間1台あたり0.05%未満)
-
100,000回の移動あたりの荷物紛失インシデント(目標:1未満)
-
検証障害の検出とアラート時間(目標:500ミリ秒未満)
-
重大な障害をヒューマンオペレーターにエスカレートする時間(目標:2分未満)
-
データ駆動型意思決定:* 特定の車両モデルのトランクラッチ障害率が0.5%を超える場合、エンジニアリングは再設計またはセンサー冗長性を優先します。特定の車両が一貫して検証チェックに失敗する場合、検査のためにサービスから外されます。特定の地理的地域が障害率の上昇を示す場合、環境要因(温度、湿度)が調査されます。
リスク軽減:安全なスケーリング
-
主張:* 設計意図と運用現実のギャップは、自動運転フリートがスケールするにつれて指数関数的に拡大します。
-
スケーリングの課題:* 1つのトランク障害は1人の乗客に影響を与え、1つのサポートチケットを生成します。数千台の車両が毎日運用されている場合、同じメカニカル障害は数百件のインシデントに増加します。数秒でリモートでパッチできるソフトウェアバグとは異なり、物理的な障害には車両リコールまたはフィールドメンテナンスが必要です。これは高額で、時間がかかり、運用上の混乱をもたらします。
-
シナリオ分析:*
-
現在の状態(5,000台の車両): トランクラッチの0.5%が年間に失敗する場合、年間25件の荷物紛失インシデントが発生します。カスタマーサポートと個別補償で管理可能です。
-
近期(20,000台の車両): 同じ障害率は年間100件のインシデントを生成します。ユーザーの信頼が低下し始めます。メディアカバレッジが増加します。規制上の精査が強化されます。
-
中期(100,000台の車両): 同じ障害率は年間500件のインシデントを生成します。集団訴訟が可能になります。保険コストが急増します。新しい市場への規制承認が遅延します。
-
軽減戦略:*
- 冗長性: 重要なサブシステム(トランクラッチ、ドアラッチ)には、メカニカルバックアップとセンサー冗長性が含まれます。プライマリラッチが失敗した場合、セカンダリメカニズムが係合します。プライマリセンサーが失敗した場合、バックアップが状態を確認します。
- 予測保守: 物理的サブシステムの継続的な監視は、障害が発生する前にそれを予測します。車両はリアクティブなスケジュールではなく、予測的なスケジュールでサービスされます。
- 迅速な対応プロトコル: システム的な障害が特定された場合(例えば、特定のサプライヤーからのラッチのバッチが高いレートで失敗する場合)、フリートオペレーターは48時間以内にリコールを実行し、影響を受けた車両をサービスから外し、メンテナンスをスケジュールできます。
- 保険と責任: 荷物紛失インシデントの包括的な補償。ユーザーに対して、何がカバーされているか、そしてなぜかについて明確に伝えます。
- 競争上の位置付け:* 最も低い物理的サブシステム障害率を実証する自動運転フリートオペレーターは、リスク回避的な乗客、企業クライアント、規制承認を引き付けます。これは好循環になります。障害率の低下→ユーザー満足度の向上→成長の加速→予測保守のためのより多くのデータ→さらに低い障害率。
戦略的地平線:次のフロンティア
-
テーゼ:* 物理的サブシステム検証は戦術的な修正ではなく、次の10年間の自動運転車産業を定義する戦略的差別化要因です。
-
なぜ今なのか:* 自動運転車は難しい問題を解決しました。複雑な環境での航行です。次のフロンティアは、詳細の信頼性です。すべてのユーザー向け操作が毎回完璧に機能することを確認します。この問題を解決するフリートオペレーターは、耐久的な競争上の利点を確立します。
-
ビジョン:* 自動運転車がとても信頼性が高いため、乗客が荷物の紛失、ドアの障害、またはメカニカルな驚きを経験しない未来を想像してください。保険会社は、障害率が実証的に低いため、より低いプレミアムを提供します。規制当局は、安全記録が例外的であるため、新しい市場をより速く承認します。企業クライアント(ライドシェアリングプラットフォーム、配送サービス、ロジスティクス企業)は、運用上の信頼性が保証されているため、このオペレーターを選択します。
これはサイエンスフィクションではありません。これは、無視されてきた問題空間に適用されるエンジニアリング上の卓越性です。Waymoのインシデントは企業の失敗ではなく、業界への贈り物です。物理的サブシステム検証が次のフロンティアであり、ファーストムーバーが勝つという明確なシグナルです。
実装ロードマップ:90日間のアクションプラン
-
Waymoと競合他社向け:*
-
1~2週目:* すべての物理的サブシステムの包括的な監査を実施します。リアルタイム検証が不足しているものを文書化します。ユーザーへの影響と障害頻度に基づいて優先順位を付けます。
-
3~4週目:* 優先度の高いサブシステム(トランクラッチ、ドアラッチ、乗客用シートベルト)の検証ワークフローを設計します。センサー要件、レイテンシ予算、エスカレーションプロトコルを指定します。
-
5~8週目:* ソフトウェアで検証システムを実装します。500台の車両のパイロットフリートに展開します。インシデント削減、ユーザー満足度、運用オーバーヘッドを測定します。
-
9~12週目:* パイロットデータを分析します。ワークフローを改善します。全フリートにスケールします。予測保守システムと統合します。最初の月次信頼性レポートを公開します。
-
成功メトリクス:*
-
90日以内に荷物紛失インシデントを90%削減
-
ユーザー満足度スコアが15ポイント以上増加
-
運用オーバーヘッド(レイテンシ、コンピュート)が総システムコストの5%未満に留まる
-
予測保守システムが発生前に80%以上の障害を特定
結論:インシデントからイノベーションへ
Waymoのインシデントは転換点です。現代の自動運転システムは複雑な交通を航行できるが、単純なメカニカル検証に失敗することを明らかにします。この非対称性は永続的ではなく、機会です。
物理的サブシステム検証を第一級の設計要件として扱う自動運転フリートオペレーター(衝突回避またはトラフィック信号認識と同等)は、信頼性の新しい標準を確立します。乗客はそのサービスを選択します。より安いからではなく、信頼できるからです。保険会社はより低いプレミアムを提供します。規制当局はそれをモデルとして引用します。これは、カテゴリー定義企業がどのように構築されるかです。
前進の道は明確です。物理的サブシステムを検証ギャップについて監査し、出発前チェックリストを実装し、冗長センサーを展開し、リアルタイムエスカレーションワークフローを確立し、継続的に測定します。正常にスケールする車両は、規模で発生する前に障害全体のクラスを排除するものです。
自動運転車の未来は、より速く、またはより安く運転することについてではありません。乗客が決してそれについて考えない例外的な信頼性についてです。その未来は今、物理的サブシステム検証を次のフロンティアとして認識するチームによって構築されています。
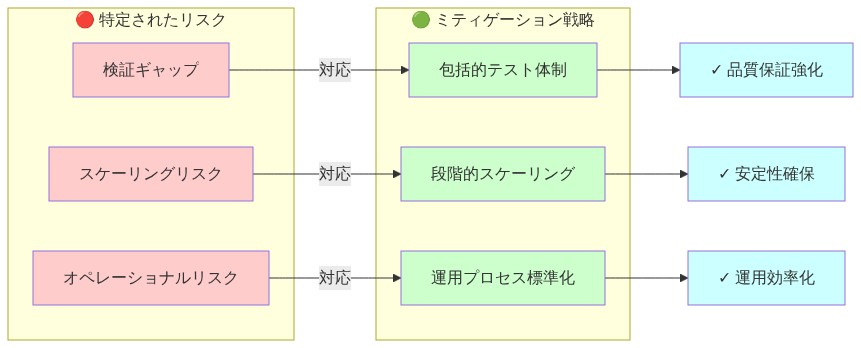
- 図12:リスク・ミティゲーション戦略マップ*