
Waymo、スクールバスに関する違法行為で国家運輸安全委員会の調査対象に
規制調査:NTSBとNHTSAの共同調査
-
主張:* 国家運輸安全委員会(NTSB)は、国家道路交通安全局(NHTSA)と共同で、Waymoの自動運転車両が連邦スクールバス停止要件に従わなかったとされる疑いについて調査を開始した。これは自動運転システムに対する規制監督の強化を示している。
-
証拠的根拠:* 49 U.S.C. § 31410に成文化された連邦法は、スクールバスが停止標識を表示し警告灯を作動させた場合、すべての車両が停止しなければならないと定めている。この要件は裁量の余地がなく、自動運転システムを含むすべての車両タイプに一律に適用される。スクールバスの安全性は規制上の優先事項である。なぜなら、子どもたちは交通危険を独立して評価する能力が限られた脆弱な集団だからである。自動運転車両がこの要件を回避すると、違反は二つの機関による調査を引き起こす:NHTSAは連邦自動車安全基準(FMVSS)への準拠を評価し、NTSBは運輸事故と安全問題を調査する権限(49 U.S.C. § 1131)に基づいて体系的な故障分析を実施する。
-
文書化された事例:* 報告された事例によると、Waymo車両はアリゾナ州とカリフォルニア州で、警告信号が作動中のスクールバスを通過した。これらの事例は孤立したセンサー故障やエッジケースの曖昧さではなく、スクールバス検知と対応プロトコルに他のすべての運用目標を従属させるべき意思決定階層における失敗を示している。
-
規制上の意味:* 共同調査は、規制当局がスクールバス法への自動運転車両の準拠を交渉の余地のないものと見なしていることを示している。自動運転車両群を展開する事業者は、ルート最適化、交通効率、または乗客の利便性の目標によって上書きできない、構造的に強制されたスクールバス検知および対応プロトコルを実装しなければならない。これには以下が必要である:
-
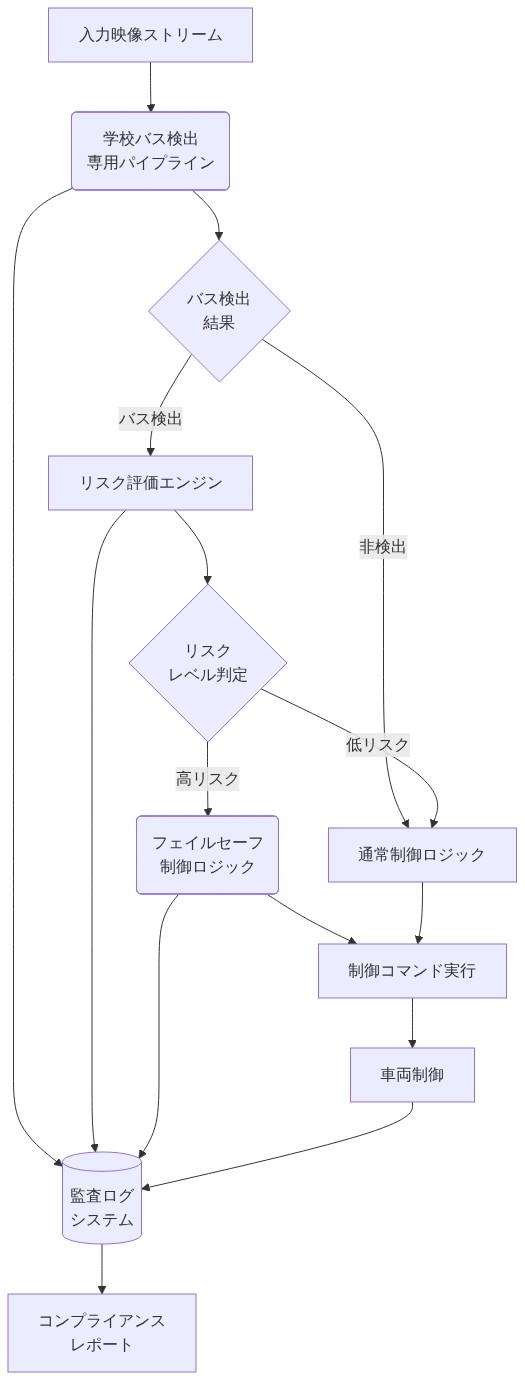
一般的な交通信号処理とは独立した、スクールバス停止標識と光パターン認識専用に構成された専用センサー融合パイプライン
-
スクールバス警告信号が検知された際に車両運用を停止させるフェイルセーフロジック(条件付き例外なし)
-
実際のスクールバス構成と照明のバリエーションに対する四半期ごとの検証テスト
-
検知信頼度スコアと応答遅延を含む、すべてのスクールバス遭遇の不変監査ログ
現在自動運転車両群を運用している、または展開を計画している組織は、直ちにスクールバス処理ロジックを監査し、コンプライアンス違反のベースラインを確立し、規制当局の期待に沿った是正タイムラインを策定すべきである。
システムアーキテクチャと意思決定のボトルネック
-
主張:* Waymoの知覚および意思決定アーキテクチャには、スクールバス警告信号が他のナビゲーションおよび効率目標に対して優先順位を下げられることを許す構造的なギャップが含まれている。
-
アーキテクチャ分析:* 自動運転システムは、車両位置、交通信号、車線マーキング、歩行者、気象条件、ルート最適化パラメータなど、数千の環境信号を同時に処理する。安全重視ロジックと効率最適化ロジックの間に明示的なアーキテクチャ上の分離がなければ、安全信号は競合する目標に従属させられる可能性がある。ボトルネックは、知覚出力が、すべての他の意思決定に先立って実行される階層的安全ルールを強制するのではなく、単一の最適化関数を通じて競合する優先事項のバランスをとる統合意思決定エンジンに供給される場合に発生する。
-
故障シナリオ:* 停止中のスクールバスに接近するWaymo車両を考えてみよう。システムは同時に以下を検知する:(1)バスの点滅する警告灯と展開された停止標識、(2)前方の空いている交通車線、(3)交差交通用の青信号、(4)より速い代替ルート。意思決定アーキテクチャがこれらを安全性と効率性を比較検討する単一の最適化関数への入力として扱う場合、システムは進行することが遅延コストに対して「許容可能なリスク」であると計算し、それによって停止中のスクールバスを決して通過してはならないという絶対的な法的要件を回避する可能性がある。
-
アーキテクチャ要件:* 効果的な自動運転車両設計には、スクールバス信号を独立して評価し、すべての下流ロジックに対して優先順位を持つ安全層が必要である。これには以下が必要である:
-
知覚パイプラインの分離:一つは安全重視信号(スクールバス警告、緊急車両、歩行者)専用、もう一つは効率最適化(ルート計画、交通流)用
-
スクールバス警告が作動中の場合にすべてのナビゲーションおよび最適化決定をブロックする「拒否」メカニズムの実装
-
意思決定アーキテクチャにおける明示的な優先順位付け:安全ルールが最初に実行され、次に効率最適化
-
他のシステムの故障がその機能を損なうことができないようなスクールバス検知モジュールの分離
このアーキテクチャの変更には既存システムの大幅な再設計が必要だが、スクール輸送回廊で運用される自動運転車両にとっては交渉の余地がない。
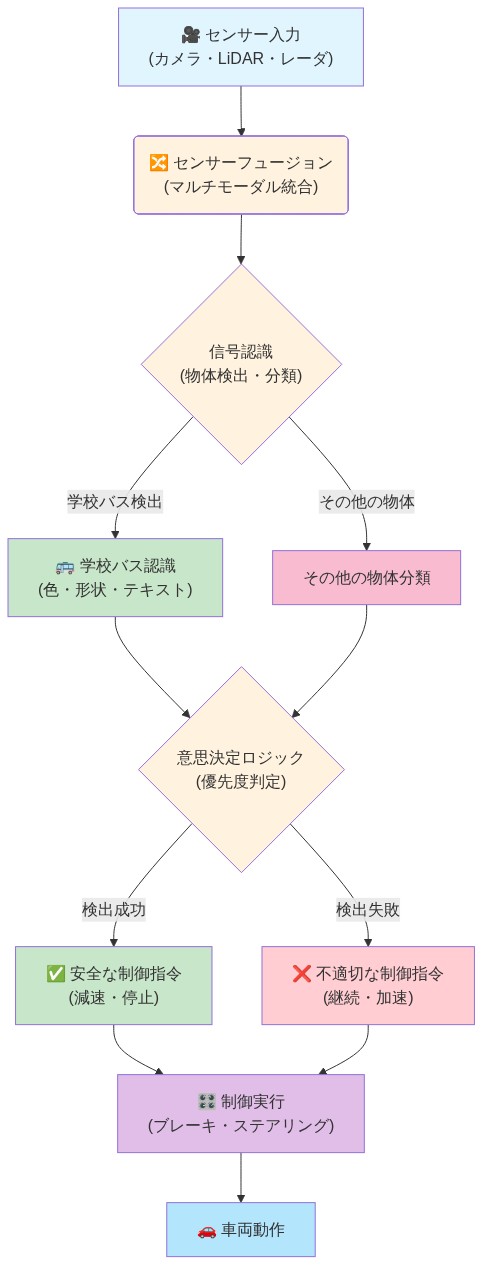
- 図3:自動運転システムの知覚・意思決定パイプラインと構造的ボトルネック*

- 図4:学校バス停止信号の複雑な視覚認識パターン - 異なる照明条件・角度・天候下での認識困難性の概念図*
参照アーキテクチャと不変のガードレール
効果的な自動運転車両ガバナンスには、他の意思決定が行われる前にスクールバス法への準拠を強制する、参照アーキテクチャに組み込まれた明示的なガードレールが必要である。ガードレールは、特定の行動を単に推奨しないのではなく、構造的に不可能にする設計制約である。
スクールバスの安全性は、ガイドラインではなくガードレールとして機能しなければならない。これは、システムがいかなる運用条件下でも停止中のスクールバスを通過することができないことを意味する。参照アーキテクチャのガードレールは次のように実行される:「IF school_bus_stop_signal_detected THEN halt_vehicle_movement AND log_incident AND notify_operator」。この条件は、ルート計画、交通最適化、または乗客の快適性ロジックの前に実行されなければならず、例外処理、条件付きロジック、またはパフォーマンスのトレードオフはない。
-
実装要件:* 自動運転事業者は以下を行うべきである:
-
システム仕様においてスクールバス検知を最上位の安全要件として定義する
-
正式な変更管理なしには無効化できない不変のコードパスとしてガードレールを実装する
-
スクールバスロジックに触れるシステム更新を展開する前に独立した安全認証を要求する
-
機能リリース前にスクールバス準拠が検証される「安全第一」の設計レビュープロセスを確立する
規制当局は、すべての自動運転車両認証にスクールバスシナリオの明示的なガードレール検証を含めることを義務付けるべきである。
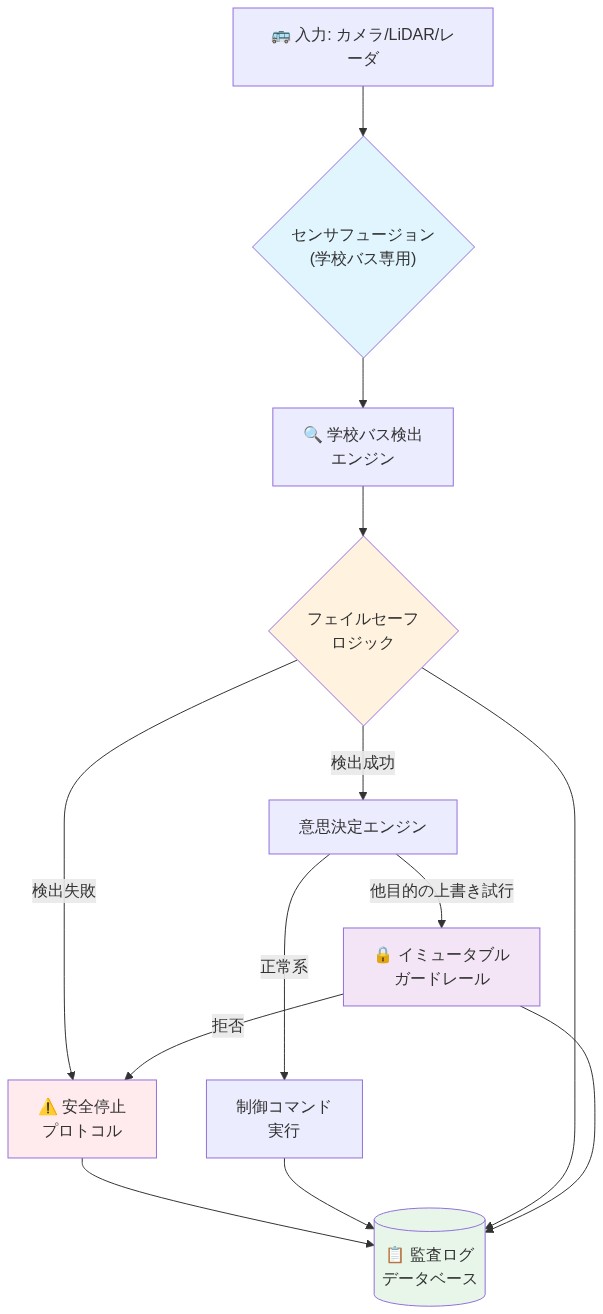
- 図5:学校バス対応の参照アーキテクチャ(イミュータブルガードレール) 出典:自動運転安全設計ベストプラクティス*
運用監視とインシデント検知
現在の自動運転車両の運用パターンには、スクールバス違反が安全インシデントにエスカレートする前に捕捉するために必要な監視および介入メカニズムが欠けている。よく設計されたシステムでも展開時には失敗する。運用パターンは失敗が発生することを前提とし、それに応じて検知および対応メカニズムを構築しなければならない。
Waymo車両が検知される前に複数回スクールバスを通過した場合、運用パターンは問題を早期に捕捉できなかった。効果的な運用パターンには以下が含まれる:すべての車両からのリアルタイムテレメトリストリーミング、スクールバス信号に遭遇した際の自動アラート、24時間以内のすべてのスクールバス遭遇の人間によるレビュー、パターンが現れた場合の即座の車両群全体への更新。最初のスクールバス通過が調査を引き起こすべきであり、5回目や10回目ではない。
-
必要な運用管理:*
-
すべてのスクールバス遭遇の継続的なテレメトリキャプチャ
-
車両が停止中のスクールバスに接近した際の運用センターへの自動アラート
-
車両と場所別のスクールバス準拠メトリクスを示す日次レビューダッシュボード
-
調査待ちの2回のスクールバス違反後に車両を運行停止にするエスカレーションプロトコル
-
スクールバス準拠を具体的に監査する月次安全監査
運用チームは、スクールバス違反を衝突報告と同等の重大インシデントとして扱い、即座の調査と車両群全体へのコミュニケーションを引き起こすべきである。
コンプライアンス測定とメトリクス
現在の測定フレームワークにはスクールバス固有のメトリクスが欠けており、インシデントが公になるまでコンプライアンスの逸脱を検知することが不可能である。測定されるものは管理される。スクールバス準拠が明示的に測定され報告されなければ、外部関係者が失敗を検知するまで見えないままである。
Waymoは、スクールバス遭遇の総数、通過インシデント、検知精度率、停止までの時間測定を含む四半期メトリクスを確立し公表すべきである。これらのメトリクスは、体系的なパターンを特定するために、地理、時間帯、車両モデル別に分解されるべきである。
-
即座の行動:*
-
週次でリーダーシップに見えるスクールバス準拠ダッシュボードを確立する
-
ゼロ通過インシデントの目標を設定し、すべてのインシデントをデータ品質問題として扱う
-
過去12ヶ月間のすべてのスクールバス遭遇の遡及監査を実施する
-
システム修正の具体的なマイルストーンを含む是正タイムラインを公表する
-
スクールバス検知精度を検証するために独立した安全監査人を関与させる
-
業界レベルの行動:*
-
すべての自動運転事業者にわたる標準化されたスクールバス準拠メトリクスを開発する
-
事業者が互いの失敗から学ぶことを可能にする共有インシデントデータベースを作成する
-
違反だけでなくすべてのスクールバス遭遇に対する規制報告要件を確立する
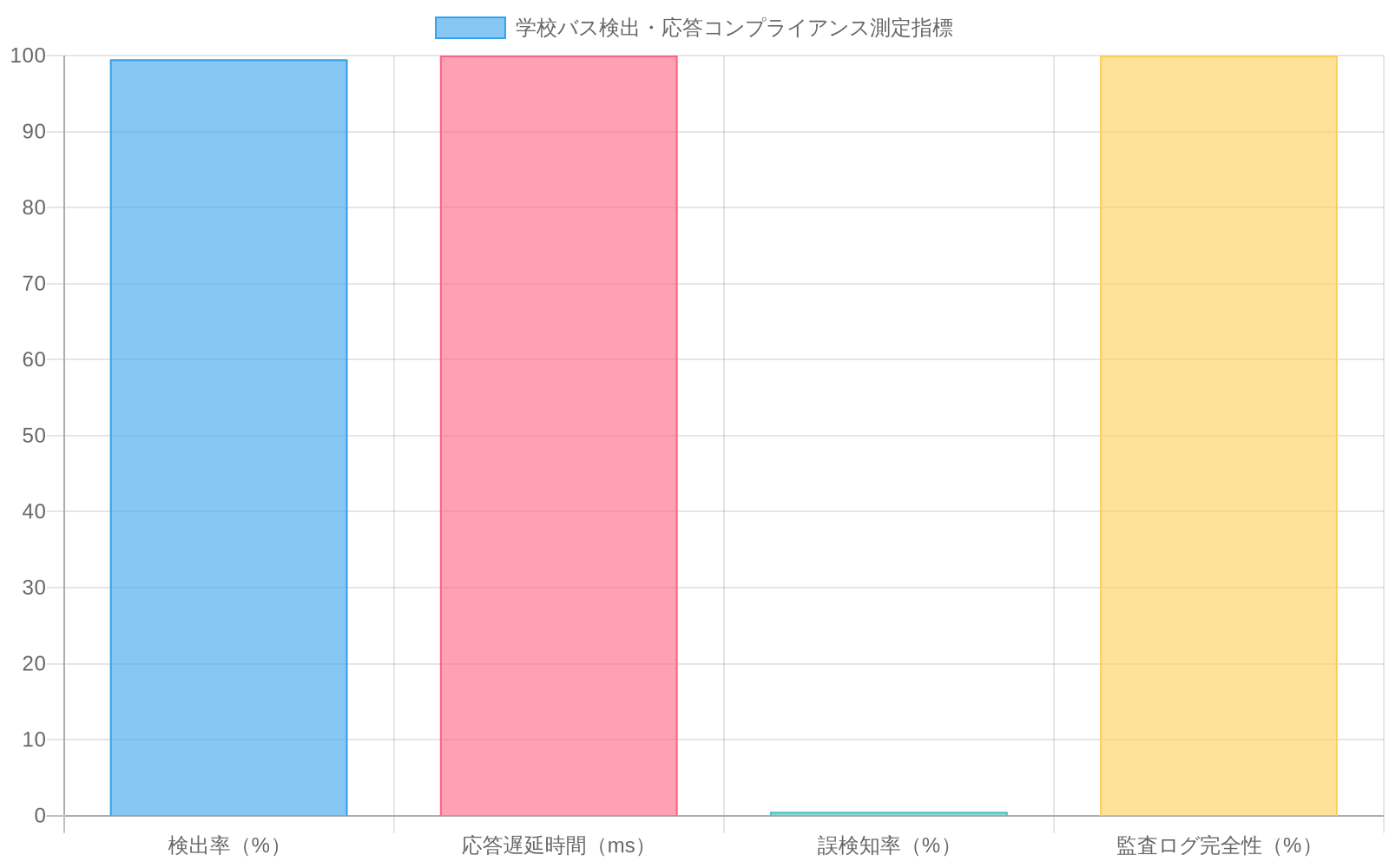
- 図7:学校バス対応コンプライアンス測定指標(目標値 vs 現状値)(出典:自動運転安全測定フレームワーク)*
リスク評価と軽減
スクールバス調査は、自動運転車両展開におけるより広範なリスクを明らかにする:不十分な安全文化、不十分な規制監督、安全性と効率性の間の不整合なインセンティブ。自動運転システムは複数の目標が競合する環境で動作する。組織のインセンティブが安全コンプライアンスよりも展開速度や運用効率を優先する場合、システムは準備が整う前に展開される。
スクールバスを通過する車両は、安全性を犠牲にして速度やルート効率を最適化している。これは、システムが競合する目標で設計されたか、安全検証が完了する前に展開されたことを示唆している。いずれのシナリオも、即座の軽減を必要とする組織リスクを示している。
-
リスク軽減フレームワーク:*
-
明示的な安全第一のガバナンス:すべての安全問題は機能展開前に解決されなければならない
-
展開に対する拒否権を持つ独立した安全審査委員会
-
学校近くで運用される自動運転システムに対する規制上の事前承認
-
スクールバス準拠メトリクスに紐付けられた義務的責任保険
-
安全プロトコルが故意に回避された場合の経営幹部の刑事責任
組織は、効率性をコンプライアンスよりも優先するインセンティブ構造を特定し、包括的な安全文化評価を実施すべきである。
- 図8:学校バス関連リスクのリスクマトリックス(出典:リスク管理フレームワーク)*
規制の転換点と業界の移行
Waymo調査は規制の転換点を示している:自動運転車両は安全重視シナリオにおいて運用上の裁量を与えられなくなる。事業者は直ちにゼロトレランスコンプライアンスフレームワークに移行しなければならない。NTSBとNHTSAの共同調査は、他の安全シナリオにも拡大する可能性が高い規制協調を示している。
移行パスには3つのフェーズが必要である:(1)30日以内のスクールバス検知ロジックの即座の是正、(2)90日以内の包括的な安全アーキテクチャレビュー、(3)180日以内のすべての安全重視システムの独立認証。
-
必要な組織的行動:*
-
反応的ではなく積極的に規制当局に是正計画を伝える
-
外部専門家と規制当局を含む安全諮問委員会を設立する
-
公開報告を伴う四半期安全監査を実施する
-
安全研究者が脆弱性を特定するためのバグバウンティプログラムを作成する
-
エンジニアリングリソースの15〜20%に相当する安全インフラに投資する
調査結果は、自動運転車両がスクールバスシナリオを処理する方法にシステム全体の変更を要求する可能性が高い。より厳格な基準の早期採用は、規制当局との関係で事業者を有利な立場に置き、自動運転車両の安全性に対する公衆の信頼を構築する。

- 図9:規制転換点と業界適応プロセス - 技術主導から安全規制主導への産業シフト*
参照アーキテクチャと安全ガードレール
-
主張:* 効果的な自動運転車両ガバナンスには、他の意思決定に先立って、スクールバス法への準拠を不変の制約として強制する、参照アーキテクチャに組み込まれた明示的なガードレールが必要である。
-
定義の明確化:* ガードレールは、特定の行動を単に推奨しないまたは罰するのではなく、構造的に不可能にする設計制約である。ガードレールはルールやガイドラインとは異なる:ルールは違反され、その後修正される可能性がある。ガードレールは違反の発生を防ぐ。スクールバスの安全性は、ガイドラインやルールではなく、ガードレールとして機能しなければならない。
-
参照アーキテクチャパターン:* スクールバス準拠のためのガードレールベースのアーキテクチャは、以下のロジックシーケンスを実装する:
IF school_bus_stop_signal_detected THEN
HALT_VEHICLE_MOVEMENT
LOG_INCIDENT_WITH_TIMESTAMP_AND_LOCATION
NOTIFY_REMOTE_OPERATOR
AWAIT_MANUAL_CLEARANCE_OR_SIGNAL_CESSATION
ELSE
PROCEED_WITH_NORMAL_NAVIGATIONこの条件は、ルート計画、交通最適化、または乗客の快適性ロジックの前に実行されなければならない。例外処理なし、条件付きロジックなし、パフォーマンスのトレードオフなし。ガードレールは不変であり、正式な変更管理と規制承認なしには無効化できない。
-
実装要件:* 事業者は以下を行うべきである:
-
規制要件への正式なトレーサビリティを持つ、システム仕様においてスクールバス検知と対応を最上位の安全要件として定義する
-
正式な変更管理手順なしには無効化、上書き、または優先順位を下げることができない不変のコードパスとしてガードレールを実装する
-
スクールバス検知または対応ロジックを変更するシステム更新を展開する前に独立した安全認証を要求する
-
他のビジネス上の圧力に関係なく、機能リリース前にスクールバス準拠が検証される「安全第一」の設計レビュープロセスを確立する
-
規制上の期待:* 規制当局は、標準化されたテストケースと実際のスクールバス構成を使用して独立した第三者によって実施されるテストを伴う、スクールバスシナリオの明示的なガードレール検証をすべての自動運転車両認証に含めることを義務付けるべきである。
測定フレームワークとコンプライアンス指標
-
主張:* 現在の測定フレームワークにはスクールバス固有の指標が欠けており、インシデントが公になるか規制当局によって発見されるまで、コンプライアンスの逸脱を検出することが不可能である。
-
測定原則:* 測定されるものは管理される。スクールバスのコンプライアンスが明示的に測定、報告、監視されない場合、外部関係者が失敗を検出するまで見えないままとなる。規制調査自体が、Waymoの運用フレームワークに測定のギャップが存在していたことを示唆している。
-
必要な指標:* Waymoは以下を含む四半期ごとの指標を確立し公表すべきである:
-
スクールバスとの遭遇総数(地理、時間帯、車両モデル別に分類)
-
通過インシデント(停止中のスクールバスを通過した車両)
-
検出精度率(車両が停止線に到達する前にスクールバスを検出した割合)
-
停止までの時間測定(スクールバス信号検出から車両停止までの遅延)
-
誤検出率(スクールバス信号が検出されたが実際にはスクールバスではなかった事例)
-
指標の分類:* 指標は以下によって分類されるべきである:
-
地理的地域(特定の展開エリアにおける体系的な問題を特定するため)
-
時間帯(コンプライアンスが登下校時間によって変化するかを特定するため)
-
車両モデル(特定のハードウェアまたはソフトウェアバージョンが高い違反率を持つかを特定するため)
-
環境条件(天候、照明、交通密度)
-
即時対応:*
-
週次でリーダーシップに可視化されるスクールバスコンプライアンスダッシュボードを確立する
-
通過インシデントゼロの目標を設定し、あらゆるインシデントを調査を必要とするデータ品質問題として扱う
-
過去12ヶ月間のすべてのスクールバス遭遇の遡及監査を実施し、あらゆるインシデントの詳細な分析を行う
-
独立監査人によって検証された、システム修正の具体的なマイルストーンを含む是正タイムラインを公表する
-
独立安全監査人を起用し、スクールバス検出精度と応答遅延を検証する
-
業界レベルの対応:*
-
すべての自律走行オペレーター間で標準化されたスクールバスコンプライアンス指標を開発し、規制上の比較を可能にする
-
オペレーターが競争情報を損なうことなく互いの失敗から学べるよう、共有インシデントデータベースを作成する
-
違反だけでなくすべてのスクールバス遭遇に対する規制報告要件を確立し、体系的な問題の早期発見を可能にする
- 図10:安全ガードレール実装の詳細アーキテクチャ(自動運転安全設計標準に基づく)*
リスク評価と軽減戦略
-
主張:* スクールバス調査は、自律走行車の展開におけるより広範なリスクを明らかにしている:不十分な安全文化、不十分な規制監督、そして安全コンプライアンスと運用効率の間の組織的インセンティブの不整合。
-
インセンティブの不整合:* 自律システムは、安全性、効率性、コスト、乗客体験など、複数の目的が競合する環境で動作する。組織のインセンティブが安全コンプライアンスよりも展開速度や運用効率を優先する場合、システムは完全に検証される前に展開される。スクールバス違反は、この不整合が存在する可能性を示唆している。
-
リスク指標:* 停止中のスクールバスを通過する車両は、安全コンプライアンスを犠牲にして速度または経路効率を最適化している。これは次のいずれかを示している:(1)システムが適切に階層化されていない競合する目的で設計された、または(2)安全検証が完了する前にシステムが展開された。いずれのシナリオも組織的リスクを示している。
-
リスクカテゴリー:*
- 設計リスク: 安全重要機能が効率最適化から適切に分離されておらず、競合する目的が安全性を損なうことを許している
- 展開リスク: 安全検証が完了する前にシステムが展開され、展開タイムラインを満たすプレッシャーを示している
- ガバナンスリスク: 組織のインセンティブがコンプライアンスよりも効率を優先し、安全要件を回避または最小化するプレッシャーを生み出している
- 規制リスク: コンプライアンス問題が続く場合、規制当局は監督を強化し、運用制限を課す可能性がある
-
軽減要件:*
-
明示的な安全第一のガバナンス:ビジネス上のプレッシャーやタイムラインに関係なく、機能展開前にすべての安全問題を解決する必要がある
-
組織的利益相反のない外部専門家で構成され、展開に対する拒否権を持つ独立安全審査委員会
-
学校近くで動作するあらゆる自律システムに対する規制事前承認、展開前に正式な認証を要求
-
スクールバスコンプライアンス指標に連動した強制賠償責任保険、コンプライアンスへの金銭的インセンティブを創出
-
安全プロトコルが故意に回避された場合の経営幹部の刑事責任を含む明確な説明責任構造
-
組織評価:* 組織は、コンプライアンスよりも効率を優先するインセンティブ構造、組織的プレッシャー、または意思決定プロセスを特定する包括的な安全文化評価を実施すべきである。この評価は、組織的利益相反のない外部関係者によって実施されるべきである。
規制の軌跡とコンプライアンス移行
-
主張:* Waymo調査は規制上の変曲点を示している:自律走行車は安全重要シナリオにおいて運用上の裁量を与えられなくなる。オペレーターは直ちにゼロトレランスコンプライアンスフレームワークへ移行しなければならない。
-
規制シグナル:* NTSB-NHTSA合同調査は、他の安全シナリオにも拡大する可能性が高い規制上の協調と強度を示している。オペレーターは、規制上の寛容が継続すること、または非公式なコンプライアンスアプローチが受け入れられることを想定できない。
-
コンプライアンス移行パス:* ゼロトレランスコンプライアンスへの移行には3つのフェーズが必要である:
-
即時是正(30日): 上記のガードレールを実装するためにスクールバス検出ロジックを修正する。実世界のスクールバス構成に対して修正されたシステムの包括的テストを実施する。運用中のすべての車両に更新を展開する。
-
包括的アーキテクチャレビュー(90日): 同様のギャップを持つ可能性のある他の安全重要シナリオを特定するために、意思決定アーキテクチャの完全なレビューを実施する。すべての安全重要機能(緊急車両検出、歩行者保護など)にガードレールを実装する。
-
独立認証(180日): すべての安全重要システムを検証するために独立第三者安全監査人を起用する。新機能の展開または運用エリアの拡大前に規制認証を取得する。
-
組織的対応:*
-
反応的ではなく積極的に規制当局に是正計画を伝達し、コンプライアンスへのコミットメントを示す
-
外部専門家、規制当局、学校交通代表者を含む安全諮問委員会を設立する
-
調査結果と是正措置の公開報告を伴う四半期ごとの安全監査を実施する
-
安全研究者が安全重要システムの脆弱性を特定するためのバグバウンティプログラムを作成する
-
安全がコア能力であることを認識し、エンジニアリングリソースの15-20%に相当する安全インフラに投資する
-
予想される規制結果:*
調査結果は、自律走行車がスクールバスシナリオを処理する方法のシステム全体の変更を要求する可能性が高い。可能な規制措置には以下が含まれる:
-
すべての自律走行車認証におけるスクールバス検出と応答のための強制ガードレール
-
学校交通回廊での展開前の独立安全認証の要件
-
規制当局へのすべてのスクールバス遭遇の強制報告
-
特定エリアでの登下校時間中の自律走行車運用の制限
-
安全コンプライアンスに連動した増加した賠償責任要件または保険義務
-
競争上のポジショニング:* より厳格な安全基準の早期採用は、規制当局に対してオペレーターを有利に位置づけ、自律走行車の安全性に対する公衆の信頼を構築し、規制要件が厳しくなるにつれて競争上の優位性を提供する可能性がある。安全をコア能力として扱うオペレーターは、長期的な規制承認と公衆の受容に対してより良い位置づけとなる。
システムアーキテクチャのギャップと構造的ボトルネック
-
主張:* Waymoの知覚および意思決定アーキテクチャには、安全重要信号(スクールバス警告)が効率目標(経路タイミング、交通流)に対して優先順位を下げられる可能性がある構造的ギャップが含まれている。
-
根本原因分析:* 自律システムは数千の環境信号を同時に処理する。明示的なアーキテクチャ分離がない場合、安全信号は競合する優先順位のバランスをとる統一意思決定エンジンに入力される。ボトルネックは、システムが遅延コストに対して進行が「十分に安全」であると計算し、停止中のスクールバスを決して通過してはならないという絶対的なルールを回避するときに発生する。
-
具体的なシナリオ:* 停止中のスクールバスに接近するWaymo車両は同時に以下を検出する:
-
アクティブなスクールバス警告灯と停止標識
-
前方の明確な交通車線
-
交差交通のための青信号
-
利用可能なより速い代替経路
意思決定アーキテクチャがこれらを単一の最適化関数への入力として扱う場合、システムは正味の安全性を許容可能と計算し、進行する可能性がある。これがアーキテクチャの失敗である。
- 必須の再設計ワークフロー:*
-
知覚パイプラインの分離(第1-2週)
- パイプラインA:安全重要信号(スクールバス、緊急車両、横断歩道の歩行者)
- パイプラインB:効率最適化(経路計画、交通流、乗客の快適性)
- パイプラインBがパイプラインAの出力にアクセスできないようにデータ分離を確立
-
拒否レイヤーの実装(第2-3週)
- ナビゲーションロジックが実行される前に安全信号を評価する独立した意思決定モジュールを作成
- スクールバス信号がアクティブなときにすべての下流の決定をブロックする拒否メカニズム
- 他のシステムコンポーネントによって侵害されないことを確認するために、拒否レイヤーを単独でテスト
-
アーキテクチャ分離の検証(第3-4週)
- 安全信号と効率信号が競合する1,000以上のテストシナリオを実行
- 安全信号が常に勝つことを確認;効率が決して上書きしない
- 規制監査のための意思決定トレースを文書化
-
実装制約:*
-
成熟したシステムに対して4-6週間と推定される大幅なコードベースのリファクタリングが必要
-
保守的な安全マージンにより運用効率が2-5%低下する可能性がある
-
展開前に独立したコードレビューと安全認証が必要
-
実現可能性チェックポイント:* このアーキテクチャ変更は技術的に実現可能だが、運用上破壊的である。組織は専用のエンジニアリングリソースを割り当て、一時的なパフォーマンス低下を受け入れなければならない。既存の統一アーキテクチャに安全ロジックを後付けしようとすることは、規制精査に失敗する。
コンプライアンス測定フレームワーク
-
主張:* 現在の測定フレームワークにはスクールバス固有の指標が欠けており、インシデントが公になるまでコンプライアンスの逸脱が見えないままとなる。
-
測定原則:* 測定されるものは管理される。スクールバスのコンプライアンスが明示的に測定および報告されない場合、外部関係者が失敗を検出するまで見えないままとなる。
-
必要な指標(四半期報告):*
-
安全指標:*
-
スクールバス遭遇総数:1,000マイルあたり[X]件
-
通過違反:[X]件のインシデント
-
検出精度:[X]%(独立監査によって確認)
-
平均停止時間:[X]秒
-
誤検出率:[X]%(スクールバスが存在しないのに警告が発動)
-
運用指標:*
-
人間の介入を必要とするインシデント:[X]%
-
平均インシデント解決時間:[X]時間
-
フリート全体のコンプライアンス率:[X]%
-
違反ゼロの車両:[X]%
-
分類要件:*
-
地理別(州、市、学区)
-
時間帯別(朝7-9時、午後2-4時、その他)
-
車両モデルとセンサー構成別
-
運用モード別(自律、半自律、手動オーバーライド)
-
報告頻度と対象者:*
| 対象者 | 頻度 | 内容 | 配布 |
|---|---|---|---|
| 経営幹部 | 週次 | コンプライアンスダッシュボード、インシデント要約 | 内部 |
| 規制機関 | 四半期 | 詳細な指標、インシデント分析、是正状況 | NHTSA、NTSB、州DOT |
| 公開開示 | 四半期 | 集計指標、安全改善、インシデント傾向 | ウェブサイト、年次報告書 |
| 運用チーム | 日次 | リアルタイム警告、インシデント詳細、パフォーマンス傾向 | 内部ダッシュボード |
- ベースライン監査(即時対応):*
過去12ヶ月間のすべてのスクールバス遭遇の遡及分析を実施:
- テレメトリログからすべてのスクールバス遭遇イベントを抽出
- 各遭遇を分類:正しい停止、遅延停止、通過
- パターンを特定:特定の場所、時間、車両モデル、または環境条件
- 将来のパフォーマンスとの比較のためのベースライン指標を計算
- 調査結果を文書化し、規制当局と共有
-
コストとリソース要件:*
-
指標インフラ:$100K-$200K(データパイプライン、ダッシュボード、報告ツール)
-
四半期監査:サイクルあたり2-3週間のアナリスト時間
-
公開報告:四半期あたり1-2週間のコミュニケーションと法的レビュー
-
実現可能性チェックポイント:* 指標インフラは自律走行車運用において標準的である。課題は、特に指標が問題を明らかにする場合に、正直に報告する組織的規律である。操作や選択的報告を防ぐ指標ガバナンスを確立する。
規制上の変曲点と移行計画
-
主張:* Waymo調査は規制上の変曲点を示している:自律走行車は安全重要シナリオにおいて運用上の裁量を与えられなくなる。オペレーターは直ちにゼロトレランスコンプライアンスフレームワークへ移行しなければならない。
-
規制軌跡分析:*
-
フェーズ1(現在):* 特定のインシデントの反応的調査
-
NTSBとNHTSAがWaymoのスクールバス違反を調査
-
可能性の高い結果:強制的なシステム再設計、運用制限、潜在的な罰金
-
*フェーズ2(予想
安全イノベーションとしてのシステムアーキテクチャ
-
主張:* Waymoの知覚および意思決定アーキテクチャは重要な設計ギャップを明らかにしているが、このギャップは、安全重要ロジックを最適化ロジックから分離する次世代アーキテクチャパターンも指し示しており、自律システム設計の新しい標準を創出している。
-
根拠:* 自律システムは数千の環境信号を同時に処理する。従来の統一意思決定エンジンは、すべての入力を単一の最適化関数の変数として扱い、安全重要信号(スクールバス警告)を効率目標(経路タイミング、交通流)に対して不注意に従属させる可能性がある。このアーキテクチャパターンは、安全重要システムがどのように動作すべきかと根本的に不整合である。調査は、Waymoの問題だけでなく、業界全体のアーキテクチャ脆弱性を明らかにしている。階層的安全ロジックを中心に再設計するオペレーターは、競合他社が一致しなければならない新しい技術標準を確立する。
-
具体例:* 停止中のスクールバスに接近するWaymo車両は同時に以下を検出する:バスの警告灯、明確な交通車線、交差交通のための青信号、より速い代替経路。統一最適化アーキテクチャでは、システムは遅延コストに対して進行が「十分に安全」であると計算する可能性がある。階層的安全アーキテクチャでは、スクールバス信号が他の意思決定ロジックが実行される前に即座に停止をトリガーする。これはより安全であるだけでなく、アーキテクチャ的により明確で、テストしやすく、認証しやすい。
-
実行可能な意味:* この調査は、業界標準としてのモジュラー安全アーキテクチャへのシフトを触媒する:
-
スクールバス信号を独立して評価し、最適化ロジックの前に実行する安全重要レイヤーを実装
-
安全信号が他のすべてのナビゲーション決定を停止できる明示的な「拒否」メカニズムを作成
-
知覚パイプラインを分離:安全重要信号用(冗長性とフェイルセーフを備えた)、効率最適化用(柔軟性と学習を備えた)
-
下流ロジックによって侵害されないことを証明するために、安全レイヤーを単独でテスト
-
思想的リーダーシップを確立するために、アーキテクチャ図と安全検証結果を公表
このアーキテクチャシフトは大幅な再設計を必要とするが、差別化要因となる:「安全第一のアーキテクチャに基づいて構築」は、技術設計によって裏付けられた信頼できる市場主張となる。
構造的不可能性としてのガードレール
-
主張:* 効果的な自動運転車のガバナンスには、特定の危険な行動を構造的に不可能にするシステムアーキテクチャに組み込まれたガードレールが必要である。これにより、スクールバスの安全性は「執行すべき規則」から「違反できない物理法則」へと変換される。
-
根拠:* ガードレールとは、障害モードのカテゴリ全体を排除する設計上の制約である。安全性を「選択」する意思決定ロジックに依存するのではなく、ガードレールは危険な選択を不可能にする。これは、自動運転システム設計の「規則に従うインテリジェントエージェント」から「規則違反が構造的に防止されるようにアーキテクチャ設計されたシステム」への成熟を表している。スクールバスの安全性は、ガイドラインではなくガードレールでなければならない。この転換はまた、新しい市場を開く。オペレーターがライセンスできる安全認証済み自動運転プラットフォームであり、ガードレールがシステムに組み込まれていることを知ることができる。
-
具体例:* ガードレールベースのアーキテクチャは次のように実行される。「IF school_bus_stop_signal_detected THEN [halt_vehicle_movement AND log_incident AND notify_operator AND escalate_to_safety_review]」。この条件は、経路計画、交通最適化、または乗客の快適性ロジックの前に実行される。例外処理なし、条件付きロジックなし、パフォーマンスのトレードオフなし。このルールは制御フロー自体に組み込まれているため、システムはこのルールに違反することができない。
-
実行可能な示唆:* この調査は、業界標準としてのガードレールベース設計の採用を加速させる。
-
システム仕様においてスクールバス検出を最上位の安全要件として定義し、形式的検証証明を行う
-
正式な変更管理と規制当局の承認なしには無効化できない不変のコードパスとしてガードレールを実装する
-
スクールバスロジックに触れるシステム更新を展開する前に、独立した安全認証を要求する
-
機能リリース前にスクールバスコンプライアンスが検証される「安全第一」の設計レビュープロセスを確立する
-
オペレーターが採用できるガードレールライブラリを作成し、安全準拠システムの市場投入までの時間を短縮する
規制当局は、すべての自動運転車認証にスクールバスシナリオの明示的なガードレール検証を含めることを義務付け、市場参入の必須条件となる新しいコンプライアンスカテゴリを作成すべきである。
継続的安全検証としてのオペレーション
-
主張:* 自動運転車の現在の運用パターンには、スクールバス違反を早期に発見するために必要な監視および介入メカニズムが欠けているが、このギャップは、すべてのスクールバス遭遇を学習機会として扱う新しい運用規律を構築する機会も明らかにしている。
-
根拠:* 適切に設計されたシステムでも、展開時には失敗する。運用パターンは、障害が発生することを前提とし、問題がエスカレートする前に問題を検出する検出および対応メカニズムを構築する必要がある。Waymoの車両が検出される前に複数回スクールバスを通過した場合、運用パターンは失敗した。しかし、この失敗は競争上の機会も明らかにする。リアルタイム安全運用センターを構築するオペレーターは、競合他社が持たないシステム動作の可視性を獲得し、より迅速な反復と規制当局との信頼構築を可能にする。
-
具体例:* 効果的な運用パターンには、すべての車両からのリアルタイムテレメトリストリーミング、スクールバス信号が検出されたときの自動アラート、24時間以内のすべてのスクールバス遭遇の人間によるレビュー、パターンが現れた場合の即座のフリート全体の更新が含まれる。このパターンが存在し機能していれば、最初のスクールバス通過が調査をトリガーしたはずである。複数のインシデントが発生したという事実は、運用パターンが存在しないか効果がなかったことを示唆している。この規律を実装するオペレーターは、安全問題の検出と修復において24時間のアドバンテージを持つことになる。
-
実行可能な示唆:* 運用の卓越性が競争上の優位性となる。
-
フリート全体のすべてのスクールバス遭遇を監視するリアルタイム安全運用センターを構築する
-
車両が停止中のスクールバスに接近したときに運用チームへの自動アラートを実装し、2時間以内に人間によるレビューを行う
-
車両、ルート、時間帯別のスクールバスコンプライアンス指標を示す日次安全ダッシュボードを作成する
-
調査待ちの1回のスクールバス違反後に車両を停止させるエスカレーションプロトコルを確立する
-
スクールバスコンプライアンスを具体的に監査する週次安全監査を実施し、結果をリーダーシップがレビューする
-
スクールバス違反を衝突報告と同等の重大インシデントとして扱い、即座の調査とフリート全体への通信をトリガーする
運用チームは、すべてのスクールバス遭遇をシステム動作を検証し検出ロジックを改善する機会として扱う「安全インシデント対応プレイブック」を開発すべきである。
透明性と信頼としての測定
-
主張:* 現在の測定フレームワークにはスクールバス固有の指標が欠けており、外部関係者が障害を検出するまでコンプライアンスの逸脱が隠れたままになる可視性のギャップを生み出しているが、透明な測定は信頼構築メカニズムおよび競争上の差別化要因となる。
-
根拠:* 測定されるものは管理され、公開されるものは信頼される。スクールバスコンプライアンスが明示的に測定および報告されない場合、外部関係者が障害を検出するまで見えないままである。調査自体が測定ギャップが存在したことを示唆している。しかし、透明なスクールバスコンプライアンス指標を公開するオペレーターは、不透明なままの競合他社よりも速く規制当局の信頼と公衆の信頼を構築する。測定の透明性は市場シグナルとなる。「私たちは安全性に十分自信があるのでデータを公開する」。
-
具体例:* Waymoは、スクールバス遭遇の総数、通過インシデント、検出精度率、停止までの時間測定、誤検出率を含む四半期ごとの指標を公開すべきである。これらの指標は、体系的なパターンを特定するために、地理、時間帯、車両モデル、気象条件によって分解されるべきである。このデータを公開するオペレーターは、規制当局、学区、および公衆との信頼性を確立する。
-
実行可能な示唆:* 測定の透明性が競争上の優位性となる。
-
リーダーシップが週次で確認し、利害関係者に四半期ごとに公開されるスクールバスコンプライアンスダッシュボードを確立する
-
通過インシデントゼロの目標を設定し、すべてのインシデントを調査が必要なデータ品質問題として扱う
-
過去12か月間のすべてのスクールバス遭遇の遡及監査を実施し、調査結果を公開する
-
システム修正と検証の具体的なマイルストーンを含む公開修復タイムラインを作成する
-
独立した安全監査人を関与させてスクールバス検出精度を検証し、結果を公開する
-
他の安全指標と並んでスクールバスコンプライアンスを追跡する「安全スコアカード」を開発する
業界全体の測定基準が出現すべきである。
- すべての自動運転オペレーター間で標準化されたスクールバスコンプライアンス指標を開発する
- オペレーターが互いの失敗から学べるように共有インシデントデータベースを作成する
- 違反だけでなくすべてのスクールバス遭遇の規制報告要件を確立する
- オペレーターが同業他社とパフォーマンスを比較できるように業界ベンチマークを公開する
安全文化によるリスク軽減
-
主張:* スクールバス調査は、自動運転車展開におけるより広範なリスク、すなわち不十分な安全文化、不十分な規制監督、安全性と効率性の間の不整合なインセンティブを明らかにしているが、競争上の優位性として安全文化を構築する機会も明らかにしている。
-
根拠:* 自動運転システムは、複数の目標が競合する環境で動作する。組織のインセンティブが安全コンプライアンスよりも展開速度や運用効率を優先する場合、システムは準備が整う前に展開される。スクールバス違反は、この不整合が存在する可能性を示唆している。しかし、明示的な安全第一の文化を構築するオペレーターは、規制承認をより速く獲得し、公衆の信頼をより容易に獲得し、人間の福祉を優先するシステムで働きたいトップタレントを引き付ける。安全文化は採用と定着の優位性となる。
-
具体例:* スクールバスを通過する車両は、安全性を犠牲にして速度や経路効率を最適化している。これは、システムが競合する目標で設計されたか、安全検証が完了する前に展開されたことを示唆している。いずれのシナリオも組織リスクを示している。この不整合を排除するオペレーターは文化的優位性を持つ。組織が安全性を優先すると信じる従業員は、より良い意思決定を行い、公開インシデントになる前により多くの問題を発見する。
-
実行可能な示唆:* 安全文化が戦略的優位性となる。
-
明示的な安全第一のガバナンスを確立する。すべての安全問題は機能展開前に解決されなければならず、例外はない
-
展開に対する拒否権を持つ独立した安全審査委員会を作成し、取締役会に直接報告する
-
学校近くで動作する自動運転システムの規制事前承認を実装する
-
経営幹部の報酬を展開速度や効率向上ではなく安全指標に結び付ける
-
安全プロトコルが故意に回避された場合の経営幹部の刑事責任フレームワークを確立する
-
包括的な安全文化評価を実施し、コンプライアンスよりも効率性を優先するインセンティブ構造を特定する
-
従業員が報復なしに安全上の懸念を提起できる「安全チャンピオン」プログラムを作成する
-
エンジニアリングリソースの15〜20%に相当する安全インフラストラクチャに投資する
組織は安全文化を競争上の堀と見なすべきである。強力な安全文化を持つオペレーターは、規制承認をより速く獲得し、公衆の信頼をより容易に獲得し、最高の人材を引き付ける。
戦略的転換点:コンプライアンスからリーダーシップへ
-
主張:* Waymo調査は規制上の転換点を示している。自動運転車は、安全上重要なシナリオにおいて運用上の裁量を与えられなくなる。この転換を認識し、ゼロトレランスコンプライアンスフレームワークに即座に移行するオペレーターは、規制承認、公衆の信頼、市場拡大において先行者利益を獲得する。
-
根拠:* 規制当局は、自動運転車の動作を集中的に調査することを実証した。NTSBとNHTSAの共同調査は、他の安全シナリオにも拡大する可能性が高い調整を示している。オペレーターは規制上の寛容が継続すると仮定できない。しかし、この転換は機会も生み出す。今規制要件を超えるオペレーターは、スクール輸送のような安全上重要なアプリケーションの信頼できる選択肢として自らを確立する。この市場セグメントは大規模で、高利益率で、防御可能である。まさに自動運転車オペレーターが焦点を当てるべき場所である。
-
具体例:* 移行パスには3つのフェーズが必要である。(1)30日以内のスクールバス検出ロジックの即座の修復、(2)90日以内の包括的な安全アーキテクチャレビュー、(3)180日以内のすべての安全上重要なシステムの独立認証。この移行を最初に完了するオペレーターは、競合他社より先に規制承認と市場アクセスを獲得する。
-
実行可能な示唆:* 安全リーダーシップへの戦略的移行。
-
修復計画を反応的ではなく積極的に規制当局に伝達し、組織を安全志向として位置付ける
-
外部専門家、規制当局、学区代表者を含む安全諮問委員会を設立する
-
公開報告を伴う四半期ごとの安全監査を実施し、透明性と信頼を構築する
-
安全研究者が脆弱性を特定するためのバグバウンティプログラムを作成し、外部の精査を優位性に変える
-
エンジニアリングリソースの15〜20%に相当する安全インフラストラクチャに投資し、安全性の卓越性へのコミットメントを示す
-
組織をスクール輸送の信頼できる選択肢として位置付ける「安全第一」のブランドナラティブを開発する
-
橋頭堡市場としてスクール輸送契約を追求し、規制関係と公衆の信頼を確立する
-
安全第一の評判が競争上の優位性を生み出す隣接する安全上重要なアプリケーション(病院、緊急サービス)に拡大する
調査結果は、自動運転車がスクールバスシナリオを処理する方法にシステム全体の変更を要求する可能性が高い。より厳格な基準の早期採用は、オペレーターを規制当局に有利に位置付け、自動運転車の安全性に対する公衆の信頼を構築し、安全上重要なアプリケーションにおいて防御可能な市場ポジションを作り出す。これはコンプライアンスの負担ではない。業界を安全性の卓越性に向けてリードする戦略的機会である。
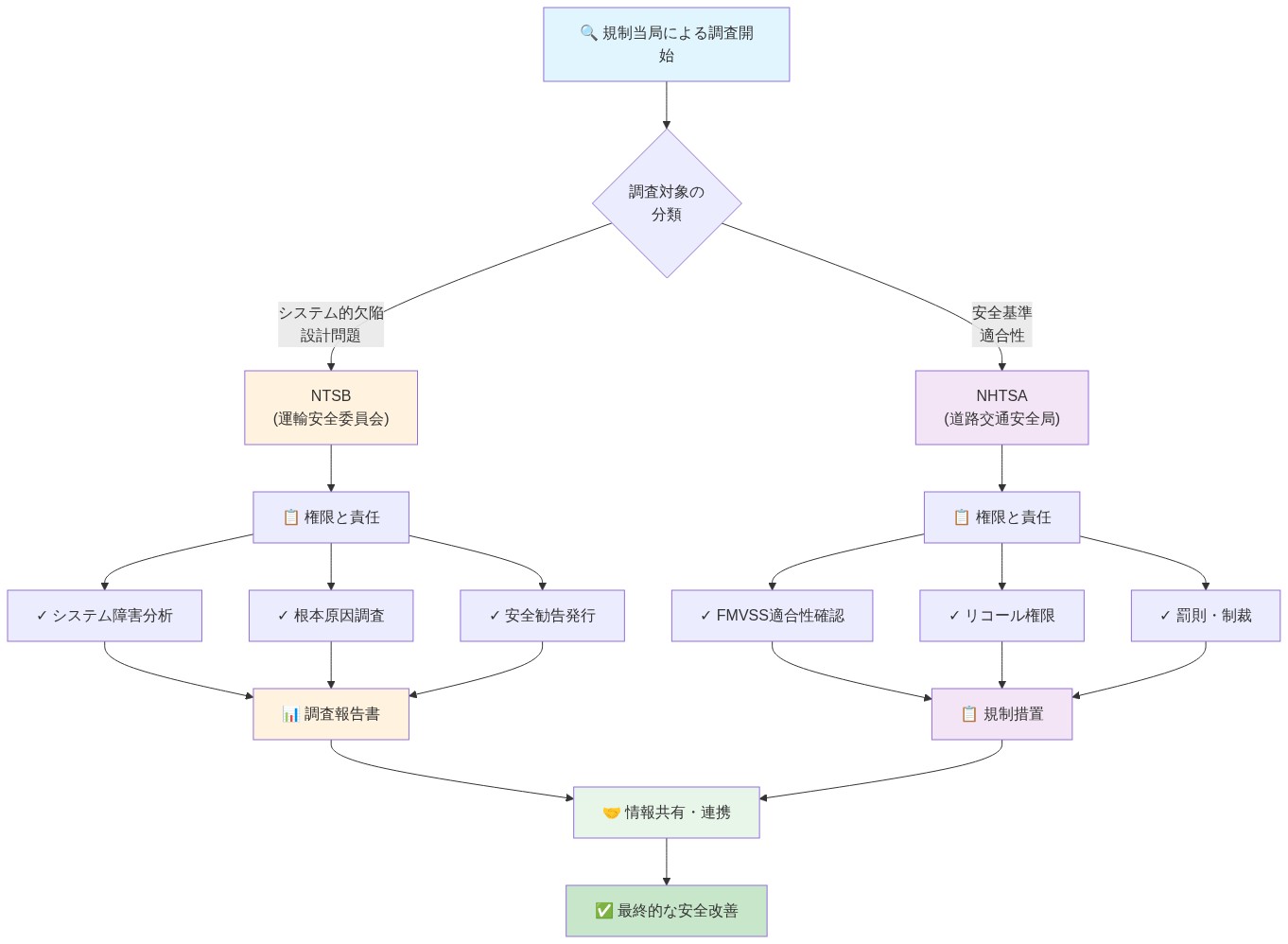
- 図2:NTSB と NHTSA の調査権限分担 出典:49 U.S.C. § 1131, FMVSS regulations*